Information Technology Reference
In-Depth Information
plane, which can be determined using a robust least median of squares method [43].
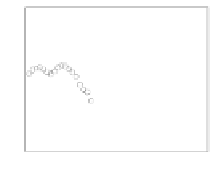
Fig. 14 (g) illustrates the saggital view of the 3-D feature positions, where the points
(“+") are those included in the ground plane (these points are outlined by two dashed
lines), and other points (“
") are treated as “objects” as they lie above the ground
plane. Using the IRLS approach, we obtain the fitted curves for the camera pose
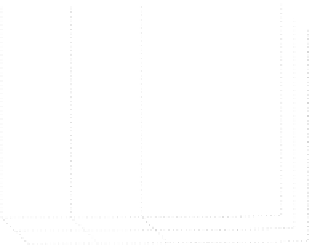
estimates, which are shown in Fig. 15. (
t
x
and
t
y
have much smaller variation than
t
z
, and are omitted.)
We again determined whether use of the gait-based algorithm leads to an im-
proved tracking of features by better predicting their position in future frames (and
so losing fewer of them) or, alternatively, whether the algorithm allowed us to sam-
ple and process frames at a lower frequency, so improving the efficiency. Fig. 16
⊕
0
0.1
0.1
−1
−2
0
0
−3
−4
−0.1
−0.1
−5
0
10
20
30
40
50
0
10
20
30
40
50
0
10
20
30
40
50
Frame number
Frame number
Frame number
(a)
t
x
(b)
t
y
(c)
t
z
5
5
5
0
0
0
−5
−5
−5
0
10
20
30
40
50
0
10
20
30
40
50
0
10
20
30
40
50
Frame number
Frame number
Frame number
(d) θ
x
(e) θ
y
(f) θ
z
40
20
0
−20
−40
−60
−20
0
x (m)
20
10
20
−20
−10
0
y (m)
(g) Saggital view
Fig. 14
Estimation of camera positions and recovery of 3-D structure for the slow walking
sequence (crosses in (g) indicate the points on the plane while circled crosses refer to obsta-
cles, and hereafter).





























































































































































































Search WWH ::

Custom Search