Information Technology Reference
In-Depth Information
the gait based system demonstrates divergence to some degree, due to the signifi-
cant intensity changes that cause less correct correspondences over frames. Taken
overall, these more complex synthetic sequences reinforce the conclusions of the
earlier experiments in that the use of gait improves the accuracy of recovery of the
ego-motion, and allows more efficient tracking as the time between frames can be
increased.
5.4
Real Image Sequences
We acquired several sequences of typical duration 10
s
from a camera mounted on
the waist of a male pedestrian. A photograph of the experimental arrangement can
be found in [40]. The images were 360
288
pixels
2
and the frame rate was 25
Hz. The shutter speed was 1/3000 sec. 150 corner features are selected in the first
frame of the image sequence. The number of these features decreases gradually as
the tracking proceeds. Although the real scene data does not have many occlusions,
visual features are lost as the pedestrian view changes, especially when rotating,
and features are also lost due to changes in lighting. After ego-motion tracking
and recovery of point-wise structure, a technique introduced by Azarbayejiani
et
al.
[1] was applied to create texture maps. Vertices from recovered 3-D points were
selected manually and then back projected onto assumed planes to yield 3-D poly-
gons. These polygons were combined with the recovered motion and the original
video sequence to render texture-mapped models by inverse projecting image pixels
onto the scene and matching the pixels with 3-D points on particular objects. These
texture maps were compared to the real images for subjective assessment only; no
manual intervention was required for the algorithm.
×
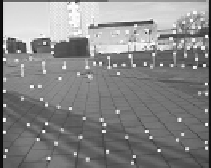
(a) 1st frame
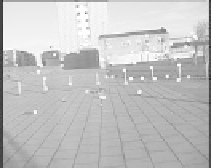
(b) 20th frame
(c) 50th frame
Fig. 13
Video sequence of slow walking with the feature points superimposed
Fig. 13 illustrates some examples from an image sequence collected by the cam-
era as the pedestrian walked slowly, where the detected and tracked feature points
are superimposed. This is the first phase, so no gait-model is employed. The number
of tracked features decreases as some disappear from view, and others are lost due
to incorrect correspondence. Figs. 14 (a)-(f) show the recovered camera positions
based on the estimated motion. Many of the detected features are on the ground




Search WWH ::

Custom Search