Information Technology Reference
In-Depth Information
10
10
5
5
0
0
−5
−5
−10
−10
50
55
60
65
70
75
50
55
60
65
70
75
Frame number
Frame number
(a) Without additive noise
(b) With noise
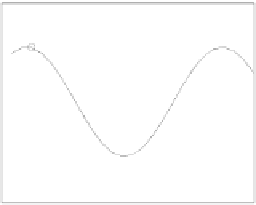
Fig. 8
Combination of translation and rotation (θ
z
). Comparison of the ground-truthed mo-
tion and estimation using the gait-based and the STK-based approaches with random noise
added: (a) no additive noise, (b) (0.0,12.0) noise. “-" - ground truth, “o" - STK-based esti-
mates, and “
×
" - gait-based estimates.
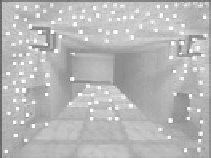
(a) Frame 1
(b) Frame 5
(c) Frame 10
Fig. 9
The “rolling" sequence with the feature points superimposed: (a) frame 1 (150 feature
points); (b) frame 5; (c) frame 10 (22 feature points).
In the sequences presented, we defined a forward translation, and the roll or yaw
angles of the “observer" were altered according to the expression: roll/yaw angles
(deg) = -6
,where
t
f
is the image frame index.
The first image sequence exhibits a pronounced rolling gait. In phase 1, feature
tracking shown in Fig. 9 leads to the history of the roll angles shown in Fig. 10(a).
This model is used for subsequent tracking with an interval of 3 frames. Fig. 10(b)
shows 25 frames immediately succeeding the learning phase, in which gait-based
strategy outperforms the STK scheme in terms of measurement accuracy. The longer
interval between the neighboring frames leads to the violation of the linearisation
assumption in the STK scheme, resulting in large errors in the estimated motion
parameters. The second image sequence is of changed yaw angles. Fig. 11 shows
feature tracking during the learning phase, leading to the estimated yaw angle (Fig.
11(a)). Similar to the previous experiment, in subsequent frames of which frames
61-120 are shown in Fig. 12 (for yaw angles), the proposed gait method has many
fewer measurement errors than the STK framework. Indeed the STK algorithm di-
verges markedly from the ground truth. Also, in the second cycle (frames 60-120)
×
sin
(
2
π
×
t
f
/
30
+
1
.
1
)


















































































Search WWH ::

Custom Search