Information Technology Reference
In-Depth Information
,
|
,
,
|
,
The smoothness measure is based on the difference between the candidate motion
vector and the median of the neighboring previously computed motion vectors.
The total metric is a combination of these two metrics. Given a vector V which
maps the current frame block X to a block Y=V(X) in the reference frame, the
metric is given by:
,
|
|
,48
The value λ is a coding parameter used to control the trade-off between the
smoothness of the motion vector field and the accuracy of the match. When λ is
very large, the local variance dominates the calculation and the motion vector
which gives the smallest metric is simply that which is closest to its neighbors.
When λ is very small, the metric is dominated by the SAD term, and so the best
vector will simply be that which gives the best match for that block. For values in
between, varying degrees of smoothness can be achieved. The parameter λ is
calculated as a multiple of the RDO parameters for the L1 and L2 frames, so that
if the inter frames are compressed more heavily then smoother motion vector
fields will also result.
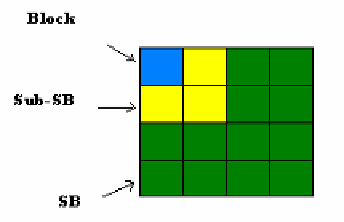
A macroblock (MB) consists of a 4x4 array of blocks and a sub-macroblock
(sub-MB) consists of an array of 2*2 blocks. It means a Sub-MB consists of 4
blocks and a MB consists of 4 Sub-MB (16 blocks) as shown in figure.
Fig. 15
Block, Sub-Macro Block, Macro Block
Total Frame size in blocks of CIF Format= 44 * 36
Total Frame size in Sub-MB of CIF Format= 22 * 18
Total Frame size in MB of CIF Format= 11 * 9
For prediction mode, we need costs for intra prediction and for bi-directional
prediction. For a splitting mode we need costs for sub-macroblock and
macroblock splittings for all four prediction modes. Dirac considers a total of 12
modes which consists of 3 Macro Block (MB) splitting levels and 4 prediction
modes. A MB can be splitted in one of three ways.
Search WWH ::

Custom Search