Image Processing Reference
In-Depth Information
(a)
(b)
0.06
0.04
0.03
0.04
0.02
0.02
0.01
surface
0
0
-0.01
-0.02
-0.02
-0.04
-0.03
-0.06
-0.04
-0.05
-0.06 -0.04 -0.02
0
0.02
0.04
0.06
-0.04
-0.02
0
0.02
0.04
Cross range (m)
Cross range (m)
(c)
0.04
0.03
0.02
0.01
0
-0.01
-0.02
-0.03
-0.04
-0.05
-0.04
-0.02
0
0.02
0.04
Cross range (m)
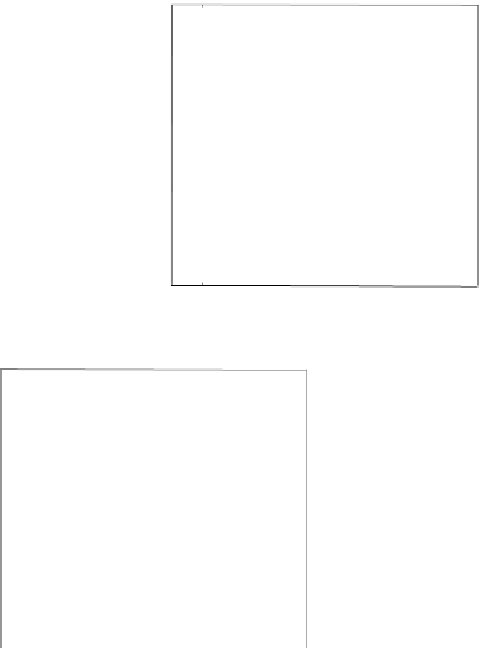
Figure c.4
Imaging of buried objects (magnitude). (a) DFT estimate of two metal spheres (angle range 0-60°),
(b) DFT estimate for angle range 14-50°, and (c) PDFT estimate for angle range 14-50°. Limiting the angular range
of the data (from (a) to (b)) suppresses the surface return and then the PDFT improves resolution (in (c)).
a priori
and design the PDFT estimate to perform well on the members of this
family. If the family incorporates our prior information about the object to be
recovered and this information is reasonably sound, then the PDFT estimate
based on the actual data should be good. If there are no more parameters
than there are data points, then the PDFT is designed to estimate the mem-
bers of the family exactly; if not, then the PDFT performs well, on average,
across the members of the family. Random noise can be included through the
use of an infinitely parameterized family. As the data is processed and new
information is obtained about the object of interest, the family can be modi-
fied to incorporate this information and the algorithm restarted, providing
a data adaptive extension of the PDFT. The idea of designing an estimation
procedure by requiring it to perform well on a family of possibilities is used
in numerical quadrature and lies at the heart of statistical estimation, where
the family is usually called an
ensemble
.
The PDFT philosophy is to use our prior knowledge to design a parame-
trized family of possible solutions and then to design an estimation procedure
that is exactly correct (if possible) for the members of the family. If the object












































Search WWH ::

Custom Search