Hardware Reference
In-Depth Information
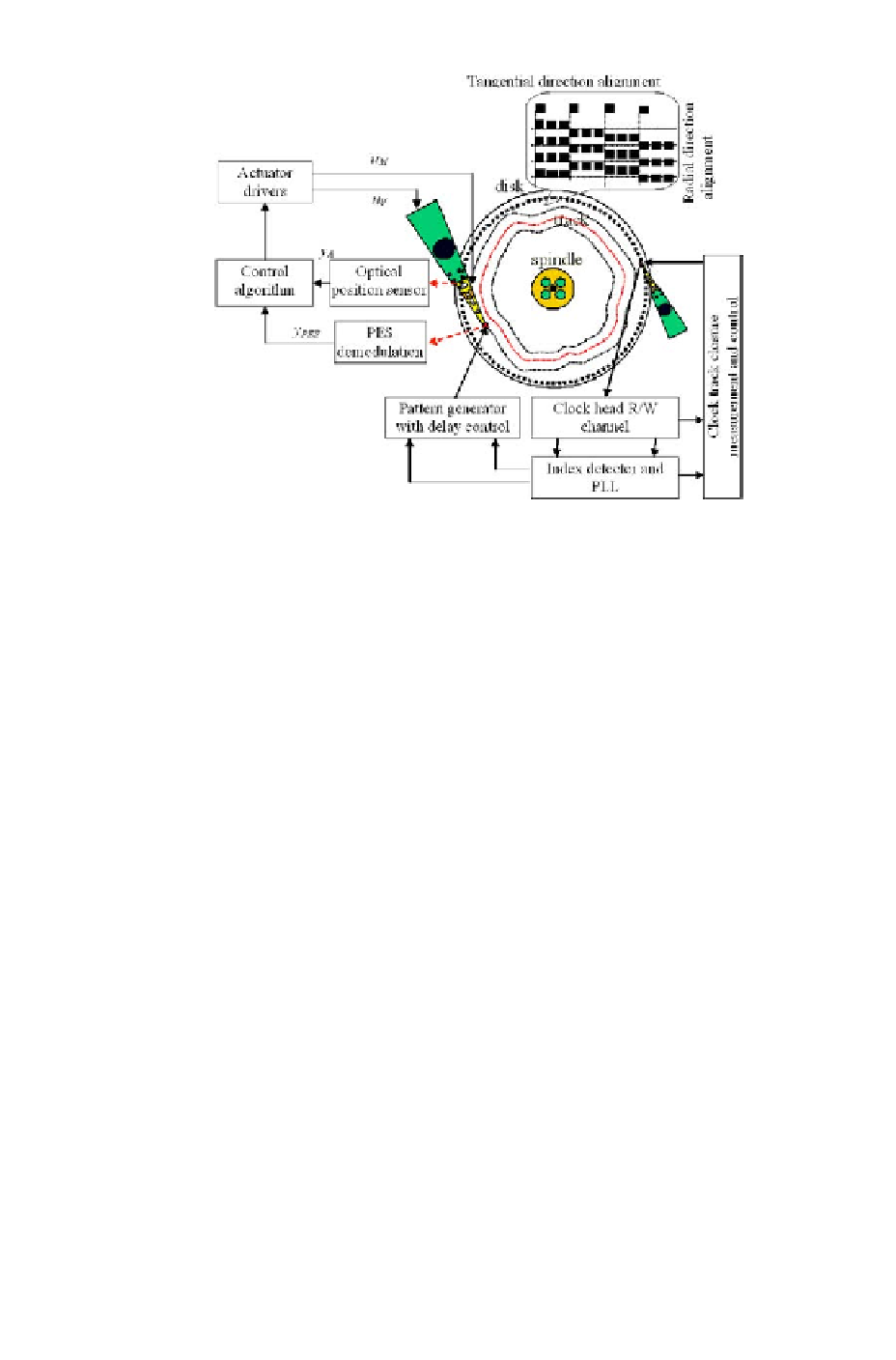
Figure 5.1: Block diagram of a servo track writer.
• L inch be range of radius of the disk over which servo tracks are to be
created,
•
s be the number of steps involved in writing one servo track with each
step involving one rotation of the disk, and
•
t
s
be the seek-settle time (seconds) taken by the position control loop of
the STW to move the head from one radial location to the adjacent one.
Then the time t required to servo write one disk is
t = LT (60/ω+ t
s
)s.
(5.1)
For example, for a 7,200 RPM, 100 kTPI 3.5” HDD, we have around 1.5 inch
radial length to be written with servo patterns. If the seek-settle time is t
s
=2
ms, and if creating one track requires to write two half-tracks, i.e., s =2,then
the time taken to complete servo writing this drive is, t =1.5 × (60/7200 +
0.002)×2 = 3100 seconds = 51.66 minutes. For this given example, seek-settle
in positioning the write head to a new location takes up 10 minutes for the
entire STW process, while 41.6 minutes is taken up by disk rotation without
any involvement of head movement. It is obvious that use of faster actuators
and better seek-settle control, higher spindle speed and less number of tracks
all help to reduce servo writing time and hence increase STW throughput.
Because of the continuous growth in areal density (and hence the TPI)
and desire for reduced manufacturing cost to survive in the highly competitive