Hardware Reference
In-Depth Information
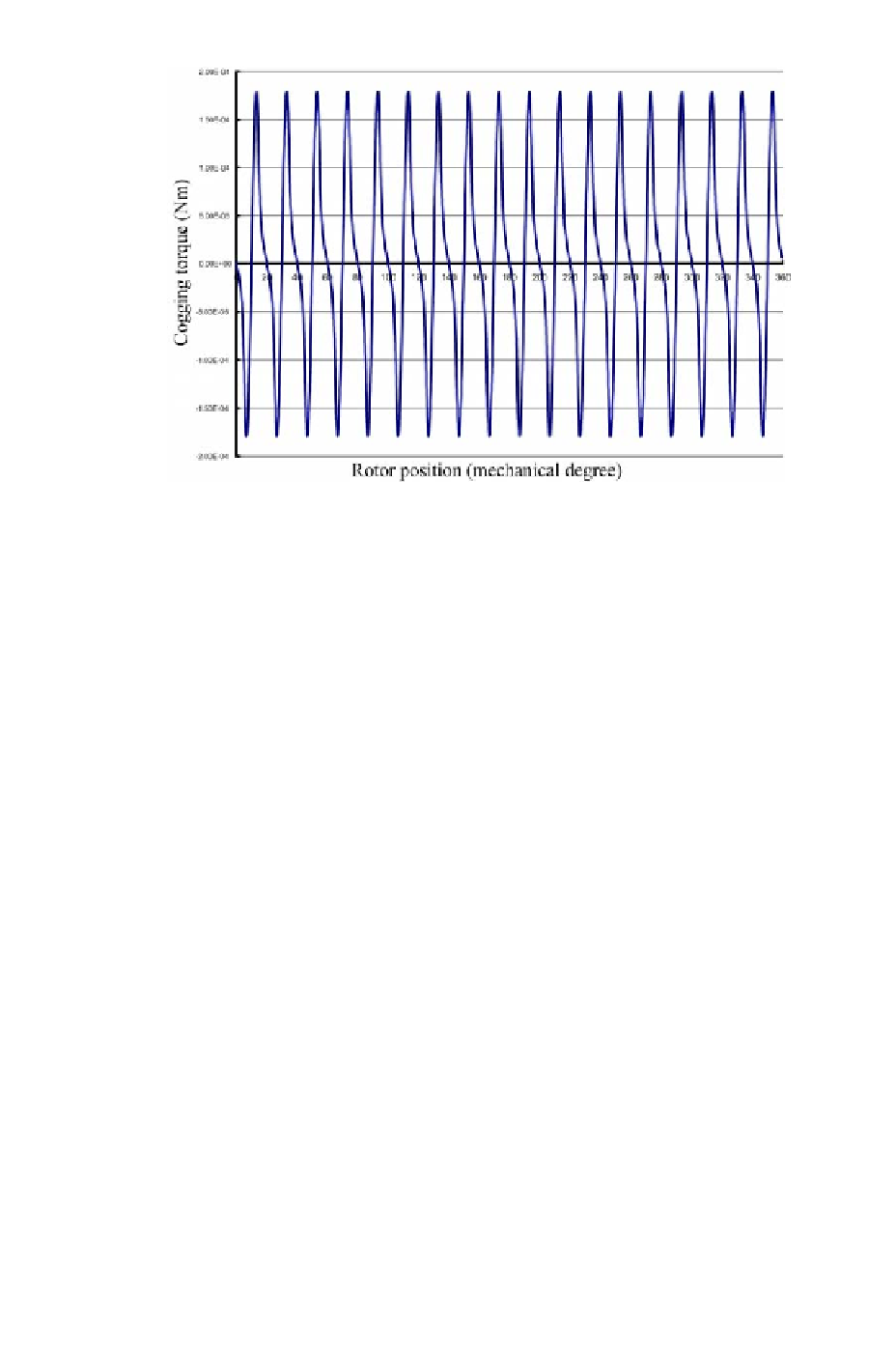
Figure 4.70: Cogging torque produced in a spindle motor with 9-slots and
3-pole-pairs (obtained by using
fi
nite element method).
As the frequency of the cogging torque is quite high in the motor operation
(refer to the example shown in Figure 4.70), and the sensorless method can
only detect few rotor position in one revolution, it is difficult to compensate
for the cogging torque using drive current when the sensorless drive mode is
used. The cogging torque is not desired in the spindle motor operation as
it causes vibration and acoustic noise. Minimizing the cogging torque is an
important task to accomplish in the design of spindle motor. Effective ways of
reducing the cogging torque in the spindle motor include use of suitable match
between the slot number and magnetic poles [70], optimizing the slot shape,
and magnetizing the magnetic ring with reasonable
fi
eld distribution [135], [32].
(2)
UMP induced in the spindle motor operation
Generation of UMP in a motor has been explained and the factors con-
tributing to the UMP are described in section 4.2.4. As the airgap
fi
eld is al-
most independent to the drive current, both the intrinsic and extrinsic UMPs
of the spindle motor can be considered independent of the motor drive mode.
The characteristic of the UMP is determined by the EM structure of the spindle
motor during the stages of design and production. The UMP produces acoustic
noise and vibration in the motor operation. The orders of the UMP harmonics
are even [17]. A good spindle motor must show low UMP. The UMP is related
to the number of slots in the stator core; using even number of slots can avoid