Hardware Reference
In-Depth Information
7
6
5
4
3
2
1
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
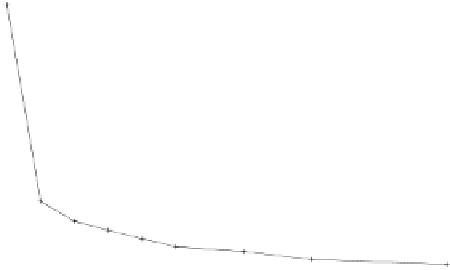
Control signal (before x20)
Figure 3.102: Combined output 3σ vs. saturation range from experimental
results. '
+
': linear controller; '*': nonlinear controller.
controller robust enough in the face of variations in the actuator parameters?
The robustness issue is addressed with the help of an experiment.
Figure 3.103 shows the responses of the system for different step inputs with
P
M
kept as constant and is equal to the DC gain of P
M
. The microactuator
control voltage is limited to ±0.15 V. Figure 3.104 shows the corresponding
y
M
and y
M
. It is clearly evident from these results that, even using just a gain
to estimate the output of microactuator, the proposed scheme is able to retain
a reasonably good stability when the microactuator is severely saturated.
45
40
35
30
25
20
15
10
5
0
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x 10
−3
Time (s)
Figure 3.103: Combined output responses with reduced order microactuator
models. r=4 µin (solid), 10 µin (dashed), and 35 µin (dotted).