Hardware Reference
In-Depth Information
Table 3.6: Parameters of a PZT actuated suspension model
k =5× 10
5
\
\
ζ
1
=0.05 ω
1
=2π× 4600
k
1
(s)=1
k
2
(s)=s
2
+2× 0.02s +(2π× 8100)
2
ζ
2
=0.02 ω
2
=2π× 8300
Figure 3.63: Illustration of actuated suspension.
30
20
10
0
−10
−20
−30
10
3
10
4
50
0
−50
−100
−150
−200
10
3
10
4
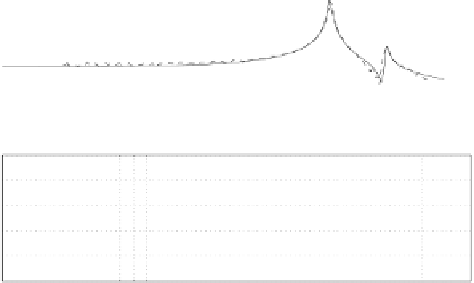
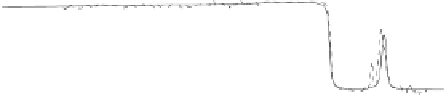
Frequency (Hz)
Figure 3.64: PZT micro-actuator frequency response.
only been able to support an open-loop bandwidth of about 3 kHz so far [212].
3.6.2 Actuated Slider
In order to bring the microactuator closer to the point of control, it can be
assembled with the head gimbal assembly (HGA). One such design is illustrated
by the schematic shown in Figure 3.65. In this configuration, the microactuator
carries the slider and rotates it as and when required to generate a rotational
motion of the read-write head.
The design of electrostatic microactuator driving the slider described in [195]