Hardware Reference
In-Depth Information
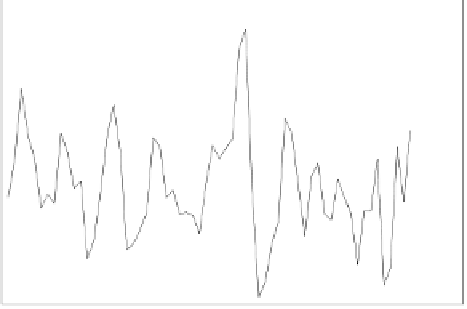
Time trace of one sector of PES
0.05
hddpes 3sigma= 0.037758
0.04
0.03
0.02
0.01
0
−0.01
−0.02
−0.03
0
10
20
30
40
50
60
70
time in sample
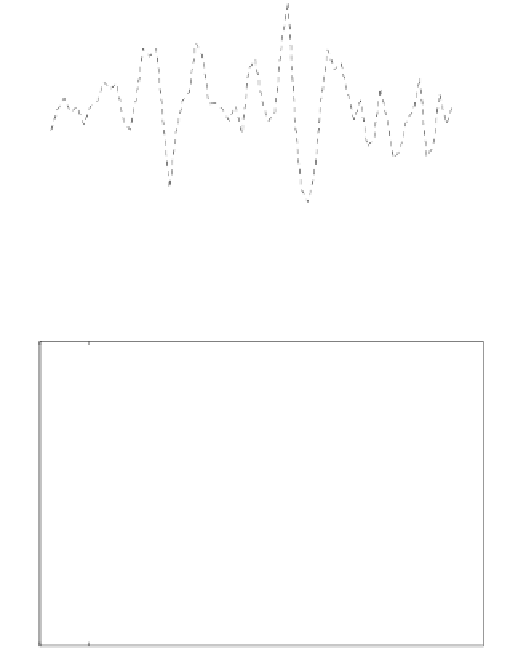
Figure 3.44: RRO (solid line) and one sector of PES (dashed line) time trace.
PSD of measured PES
0
0.015
PES
σ
−50
0.01
−100
0.005
−150
0
0
0
200
200
400
400
600
600
800
800
1000
1000
1200
1200
1400
1400
1600
1600
1800
1800
Frequency in Hz
Figure 3.45: PES power spectrum density.
nent written on the disk, especially the higher frequency components of RRO,
is essential for relaxing the burden on servo control. This must be taken care
of during the process of servo track writing, which is discussed in chapter 5.
Since RRO contains narrow band vibrations at frequencies which are integer
multiples of the spindle frequency, a common approach to cancel the effects of
RRO is to use peak filter discussed in section 3.2.5. However, such approach
alters the servo loop gain and one must check the acceptability of the stability
and transient response if the peak filter is added in the loop.
Fortunately, the RRO is phase locked to spindle rotation and, therefore,
can be modeled easily using simple experiment. Once a model of the RRO
is available, it can be compensated for using feedforward control. There are