Hardware Reference
In-Depth Information
In the present example, choosing the additional poles to be 20 times faster
than the fastest of S(s):
I
v
(s)=−
(s + 1000)7.143
×
10
−6
s
2
s +71.43
1
2.122 × 10
−7
s
2
+0.0003686s +1
. (3.82)
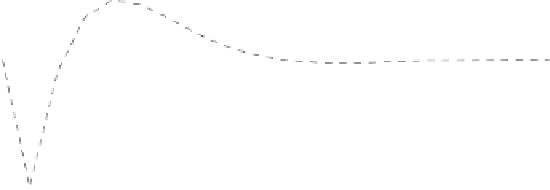
Simulation results shown in Figure 3.42 includes the plant's responses due
to initial value (solid line), due to the compensator (dashed line), and the
combined response. It is clearly evident from this simulation that the IVC
makes the initial value response decay very fast, and it is achieved without any
change in the feedback controller.
1
0.8
0.6
0.4
0.2
0
−0.2
−0.4
−0.6
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
time in sec. solid: y due to y(0), dash−dot: IVCed
Figure 3.42: Simulation result of the IVC.
3.5.3 RRO Compensation
Ideally the shape of a track written on the disk surfaces is expected to be cir-
cular. However, due to the presence of nonrepeatable runout (NRRO) sources
such as disk-spindle pack vibration, disk and slider related vibrations, sensing
noise etc in the servo track writing process, the tracks created on the disks
are not perfectly circular. In addition, any misalignment of the center of the
spindle motor axis and the geometric center of the servo tracks introduces
non-circularity in the tracks. Even the distortion of disk caused by clamping
contributes to non-circularity of tracks.
Imperfections of track are illustrated in the Figure 3.43. The non-circularity
of the tracks manifests as repeatable runout (RRO) during the track following