Hardware Reference
In-Depth Information
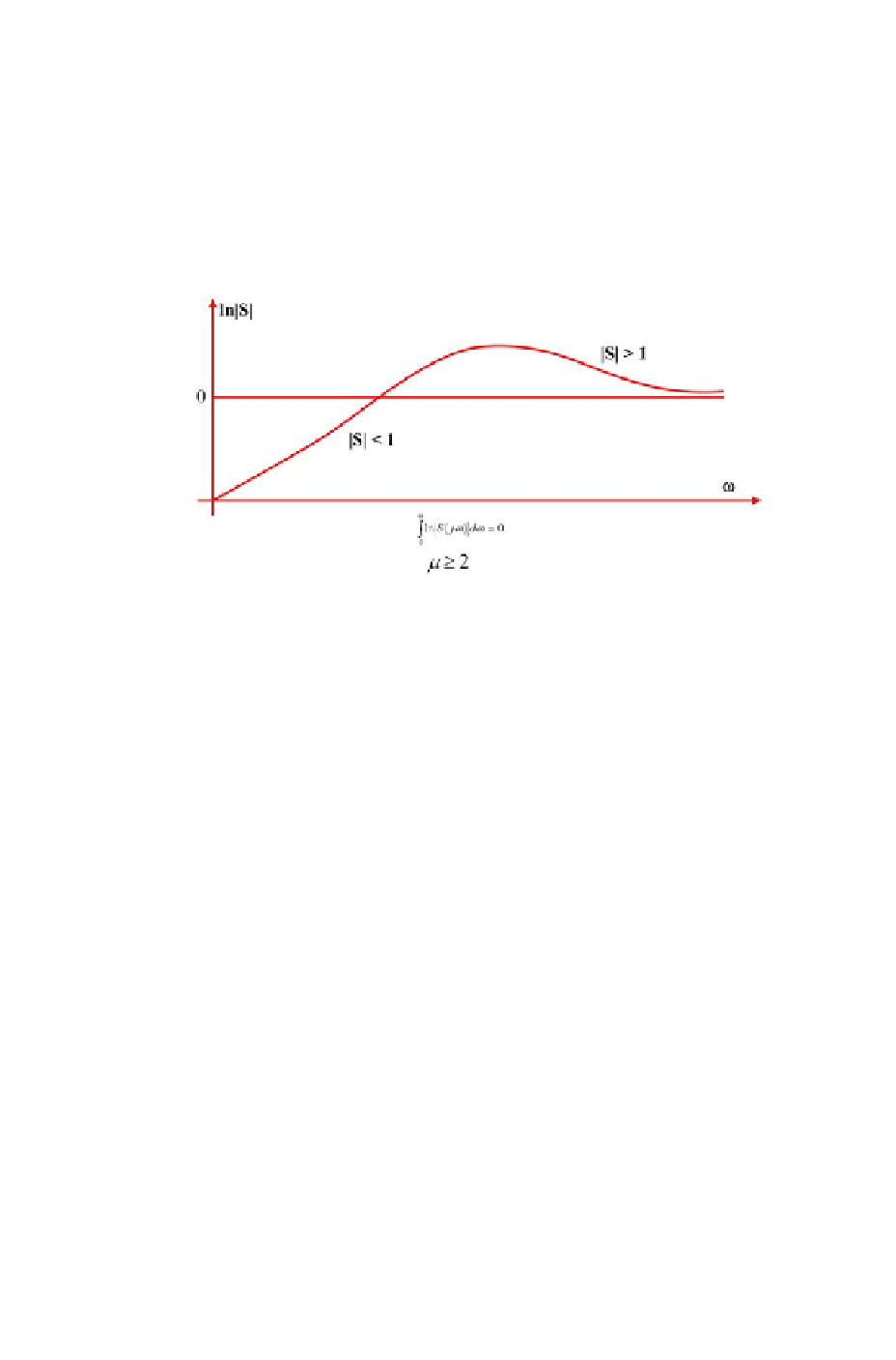
If |S(jω)| < 1(ln|S(jω)| < 0 ) over some frequency interval, then the
above mentioned relation implies that |S(jω)| > 1(ln|S(jω)| > 0 ) at other
frequencies.
This result suggests that it is not possible to achieve an arbitrary sensitivity
reduction (i.e., |S| < 1) at all points on the imaginary axis. If |S(jω)| is smaller
than one in a particular range of frequencies, then it must be greater than one
in another range of frequencies as illustrated in Figure 3.33. This phenomenon
is known as the waterbed effect .
Figure 3.33: Illustration of the waterbed effect.
The waterbed effect is apparent in continuous time systems when the rela-
tive degree of the open-loop transfer function is greater than or equal to two.
The movement of the actuator used in all position servo loops is governed by
the Newton's laws of motion, i.e., the actuator generates the driving force that
creates the acceleration, integration of the acceleration is equal to the veloc-
ity of motion, and further integration of velocity is the displacement of the
actuator. So the actuator has a relative degree of at least 2, and therefore,
the waterbed effect is inevitable. Low sensitivity hump control designs tend to
lower the relative degree of the open loop in a wide range of frequency [46] [159].
When a peak filter is included in the servo loop, it increases the loop gain
in the vicinity of the peak filter's center frequency and reduces the vibration
at those frequencies. This large increase in the magnitude of the loop gain
results in smaller gain or even attenuation in other frequencies because of the
loop's integral is a constant. Though the peak filter helps to improve suppres-
sion of vibration for frequencies around the peak filter's center frequency, the
sensitivity is increased at some other frequencies, as shown in the example of
Figure 3.29. However, regardless of the waterbed effect, the effectiveness of the
increase in loop gain at frequencies of abundant disturbances is still significant
when the compromised frequencies have relatively less vibrations.
If integral action in the controller is not required and if a pure velocity or
acceleration feedback is available by adding additional sensors, then k
s
might