Hardware Reference
In-Depth Information
3. actuator uncertainty, and
4. sampling of PES and others.
3.3.1 Limitation of S + T =1
The target of the track following controller G
c
(s) is to maintain the PES to a
minimumlevelinthepresenceofdifferent forms of disturbance and noise. In
other words, the servo controller should be designed such that the variance of
PES(s) is minimized.
Performance of a closed loop system can be easily assesed with the help
of its sensitivity transfer function S(s) and complementary sensitivity transfer
function T (s). The complementary sensitivity function defines the systems
response to the reference input as well as to the measurement noise, where as
the sensitivity transfer function measures the system's capability in rejecting
the effects of vibration and other disturbances. If for any frequency ω
0
,the
complementary transfer function T (jω
0
) = 1 then the magnitude of the output
sinusoid is equal to the magnitude of the reference input which is a sinusoid
of frequency ω
0
.Howeve ,T (jω
0
)=1alsoimpliesthatifthenoisehasa
frequency component ω
0
then the output of the closed loop system contains
a sinusoid of the same frequency with magnitude equal to that of the noise.
Similarly, S(jω
0
) = 1 implies that the magnitude of the output sinusoid is
equal to the magnitude of the disturbance sinusoid of frequency ω
0
.
20
0
−20
−40
−60
−80
−100
10
0
10
1
10
2
10
3
10
4
10
5
10
6
200
100
0
−100
10
0
10
1
10
2
10
3
10
4
10
5
10
6
Frequency (rad/s)
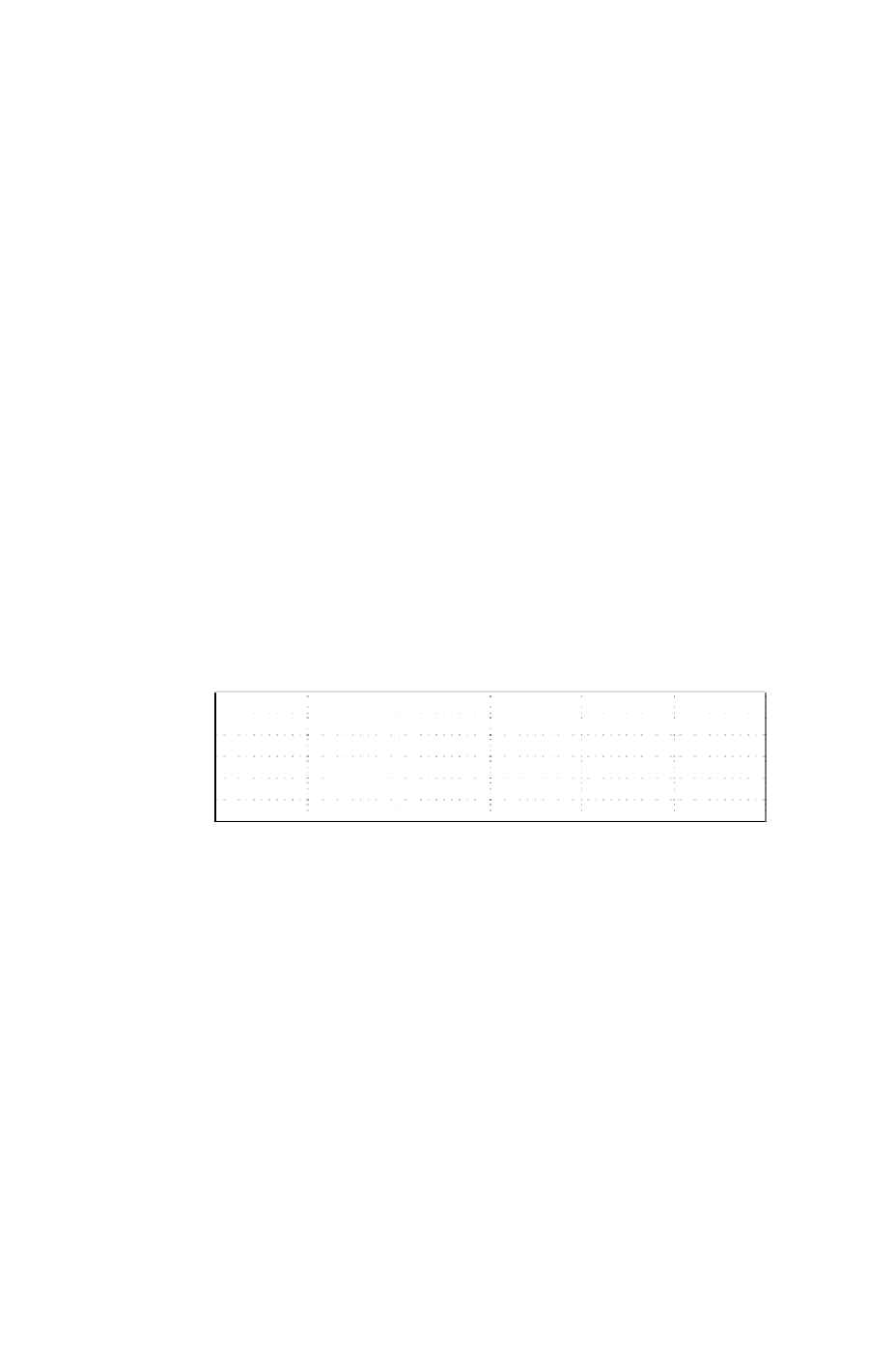
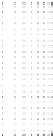
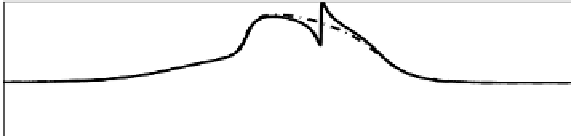
Figure 3.32: Frequency response of S (solid line) and T (dashed-line) for the
flexible actuator controled using PID type + notch + peak filter discussed in
Section 3.2.5.
It is easily deduced from the definitions of sensitivity and complementary