Hardware Reference
In-Depth Information
20
0
−20
−40
−60
−80
−100
10
0
10
1
10
2
10
3
10
4
10
5
10
6
200
100
0
−100
−200
−300
10
0
10
1
10
2
10
3
10
4
10
5
10
6
Frequency (rad/s)
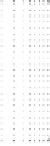
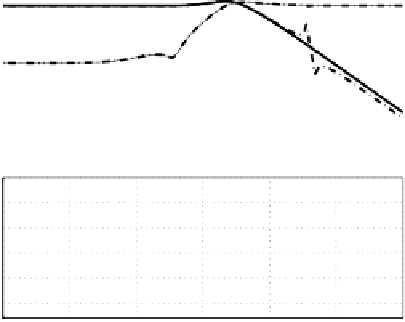
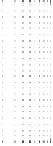
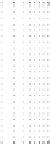
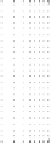
Figure 3.4: Sensitivity transfer function S(s) and complementary sensitivity
transfer function T (s) corresponding to Figure 3.2.
200
150
100
50
10
0
10
1
10
2
10
3
10
4
10
5
10
6
0
−100
−200
−300
10
0
10
1
10
2
10
3
10
4
10
5
10
6
Frequency (rad/s)
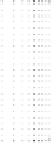
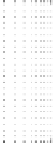
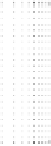
Figure 3.5: Shock transfer function S
h
(s) corresponding to Figure 3.2.
to overcome this limitation are explained in next few sections. Section 3.2.2
describes a method used to increase servo bandwidth by compensating for
the resonance mode using notch filter, while sections 3.2.3 and 3.2.4 illustrate
methods that do not compensate for the resonances but yet help to push the
servo bandwidth higher. The capability of the closed loop to suppress vibration