Hardware Reference
In-Depth Information
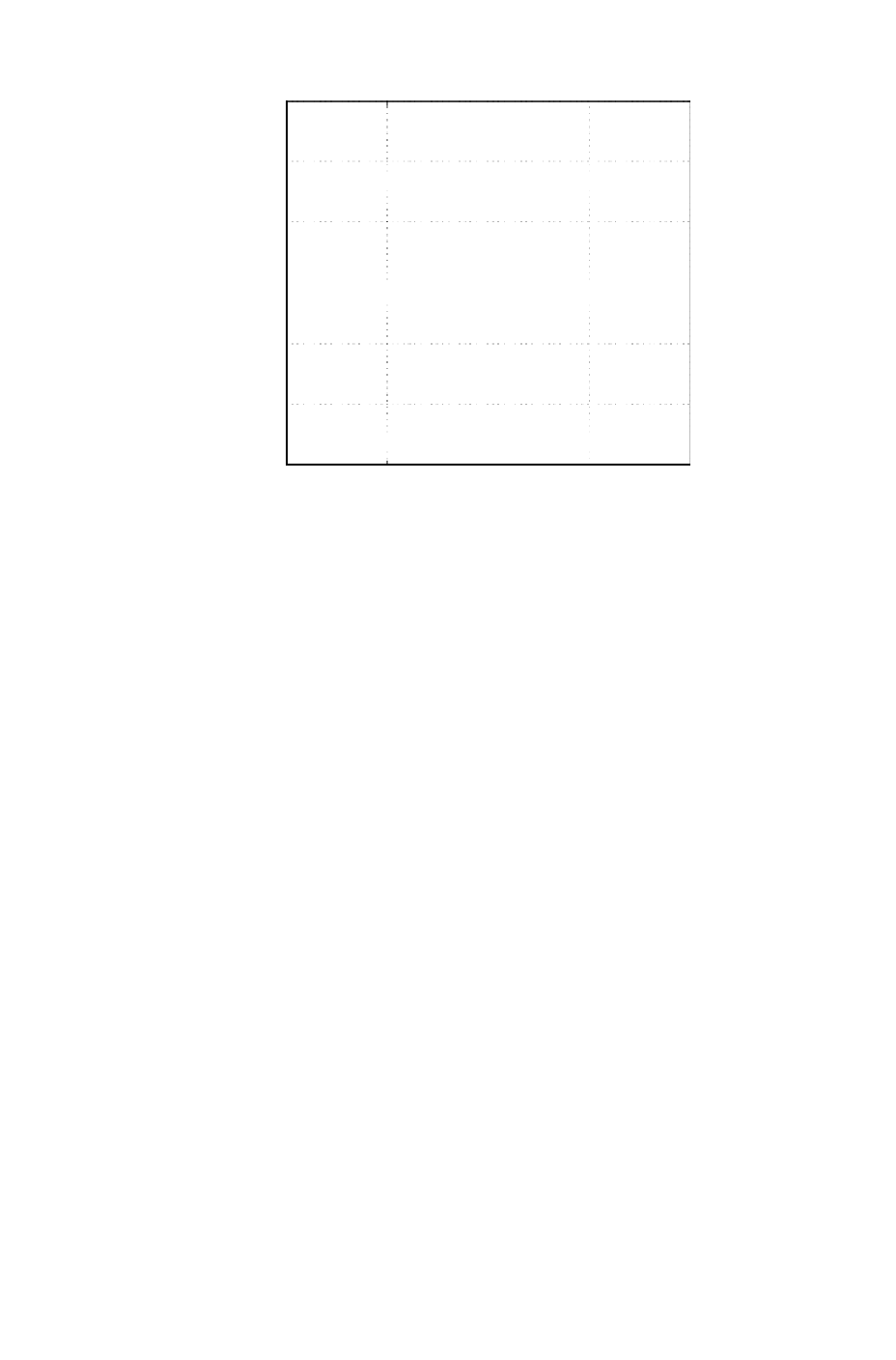
1.5
1
+10% of Track
0.5
0
−10% of track
−0.5
Position Error
−1
−1.5
1
1.5
2
2.5
3
Time (ms)
Figure 2.31: Position error for 100-track seek: Simulation result.
that includes integral control. These two methods are explained later in this
section.
The State Estimator
Considering the rigid body model (
s
2
) of the VCM actuator, corresponding
continuous-time state space model is
∙
¸
∙
¸
dp
dt
=
01
00
0
a
p +
u,
y =[1 0]p,
(2.45)
where u(t)andy(t) are the input and output of the VCM, respectively. The
state vector p =[p
1
p
2
]
T
includes the position (p
1
)andvelocity(p
2
)ofthe
head-slider effectuated by VCM's motion. In this state-space model, the unit
of velocity is tracks per second. Considering the speed of motion in HDD
servomechanism and the magnitude of displacement (maximum velocity can
be hundreds of thousand tracks per second for corresponding displacement of
few tens of tracks), this representation results in large magnitude disparity
between the two states. As a result, one of the feedback gains becomes very
large compared to the other. Such case requires extra care while implementing
the controller using fixed point processor. The issue can be resolved by suitable
transformation of variables. If we redefine the velocity in units of tracks per
sector (time between consecutive sectors is few µs only), its magnitude is scaled
down by a factor of
1
T
S
,whereT
S
is sampling interval. This is equivalent to