Hardware Reference
In-Depth Information
200
X
1
150
100
X
3
50
0
−50
−100
X
4
−150
X
2
−200
−100
−50
0
50
100
Error y
e
(Tracks)
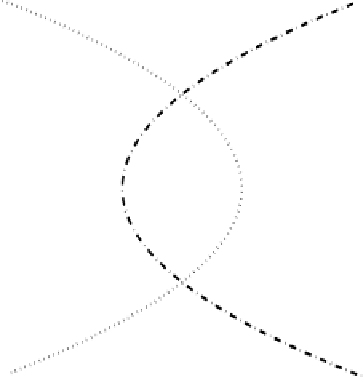
Figure 2.24: Phase plane diagram for time optimal control of double integrator.
Figure 2.25: Time optimal control: Block diagram.
where
⎨
1, x>0
−1,x<0,
0, x=0
sgn(s)=
.
(2.38)
⎩
Time optimal bang-bang control is very sensitive to noise and variation
in actuator parameters. Any small change in the acceleration constant a or
any noise in the measurement of output y makes the control signal switch be-
tween two extreme levels, a phenomenon commonly known as control chatter.
Moreover, the above mentioned control law is derived for a double integrator
model. A model with a real-axis pole and an integrator is a more appropriate
choice for majority of the electromechanical actuators used in practice, includ-
ing the VCM actuator. These actuators also manifest high frequency torsion
and bending modes. Though it is not impossible to derive theoretically the time
optimal law for such models, these formulae become increasingly more com-
plex and more difficult for practical realization for higher order plants. In all