Hardware Reference
In-Depth Information
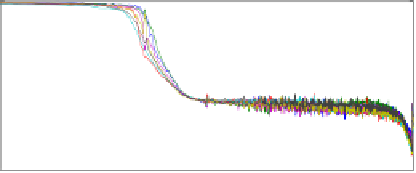
Frequency Response
60
40
20
0
−20
10
1
10
2
10
3
0
−50
−100
−150
−200
−250
−300
10
1
10
2
10
3
Frequency (Hz)
Figure 2.23: Frequency response of actuator with friction.
Preload plus Two-slope Spring Model:
F = F
c
sgn(v)+F
v
v + K
a
y; |y| ≤ S
a
F = F
c
sgn(v)+F
v
v + K
b
y +(K
a
−K
b
)S
a
;
|y| >S
a
(2.32)
F
c
and F
v
are Coulomb friction and viscous friction, respectively. This model
uses two different spring constants, one for small displacement and the other for
large displacement. The model is linear in all parameters except S
a
,thebreak
point in the spring stiffness. The model is found to produce very good match
between observed response and model response in frequency domain, but not
in the time domain hysteresis curve of input voltage versus displacement.
Classical Dahl Model plus Viscosity: The classical Dahl model does not
give a good match between the experimental observations and actuator model
response in both time and frequency domains. Adding a viscosity term im-
proves the results with the exception at the point where velocity reversal oc-
curs.
Hysteretic Two-Slope Model: This model combines two-slope spring be-
havior and the hysteretic type behavior of the Dahl model. This model has
only 4 parameters, but is not suitable for on-line identification.
These models show better result than the classical model of friction, but
fail to match the response of the system in both time and frequency domain.