Environmental Engineering Reference
In-Depth Information
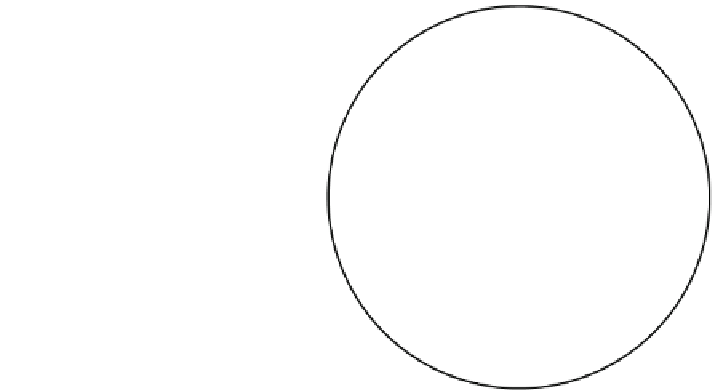
Fig. 5.4 Scheme of a swit-
ched reluctance motor
used in the past as traction motors for electric vehicle, especially for their easy
regulation. They were then substituted by induction motors for their robustness,
reliability and low cost, as described in the following paragraphs.
In permanent-magnet DC machines, the excitation static magnetic field is
generated on the stator by using permanent magnets. DC-switched reluctance
motors have 'notches' or 'teeth' on both stator and rotor, which are called salient
poles. Each couple of opposite poles on the stator carries a couple of excitation
coils electrically connected in series to form a couple of magnetic poles, whereas
the rotor has no windings. When a DC voltage supplies a phase of the stator
windings, the rotor rotates to minimize the reluctance of the magnetic circuit
through rotor and stator. In Fig.
5.4
, an example of switched reluctance motor is
shown [
1
,
3
].
The DC motor is still used for some specific traction applications, but has been
almost completely substituted by other types of motors, which are becoming more
common for the electric vehicles.
5.2.2 AC Electric Machines
AC machines have one or more sets of three-phase windings distributed on the
stator. The number of these set of windings is called number of poles of the electric
machine. These three-phase windings are distributed along the stator in a sym-
metrical way in the space. For that reason, when a three-phase AC voltage is
applied to the stator winding a rotating and sinusoidal magnetic field is generated
along the air gap. The orientation of that magnetic field changes according to the
sign of the three-phase AC currents flowing in the windings. The rotating magnetic
field rotates at the so-called synchronous speed, which is equal to the pulsation of
the three-phase voltage (x = 1/f) divided by the number of poles [
9
].