Information Technology Reference
In-Depth Information
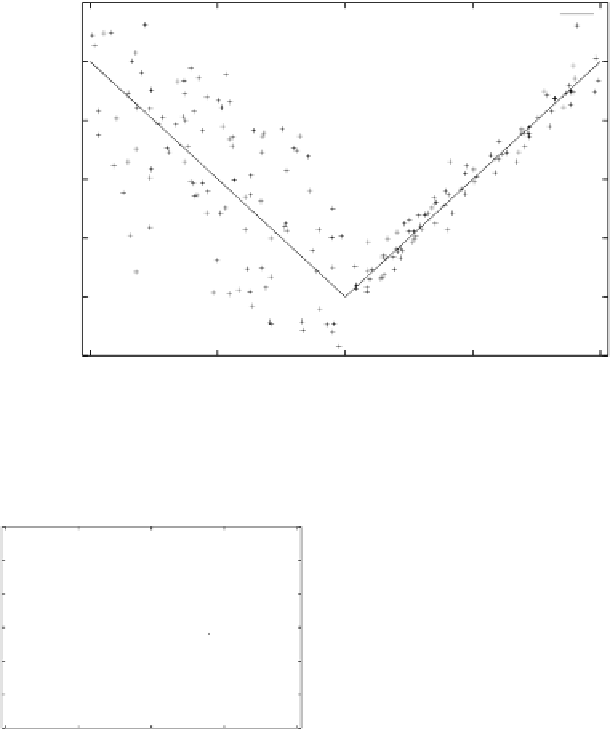
Function with Variable Noise and Available Data
1.5
f(x) mean
data
1
0.5
0
-0.5
-1
-1.5
-1
-0.5
0
0.5
1
Input x
Fig. 8.10.
Plot showing the mean of the function with variable noise, and the 200
observations that are available from this function
Mixed Prediction and Prediction of Classifiers
Fitness and Average Number of Classifiers
1.5
-40
5
data
pred +/- 1sd
f(x)
cl. 1
cl. 2
max. fitness
avg. fitness
min. fitness
avg. K
-60
1
4
-80
0.5
-100
3
0
-120
2
-140
-0.5
-160
1
-1
-180
-1.5
-200
0
-1
-0.5
0
0.5
1
0
50
100
150
200
250
Input x
GA iteration
(a)
(b)
Fig. 8.11.
Plots similar to the ones in Fig. 8.5, where GA model structure search was
applied to a function with variable noise. The best discovered model structure is given
by
l
1
=
−
0
.
82
,u
1
=0
.
08 and
l
2
=0
.
04
,u
2
=1
.
00.
clearly visible in both Fig. 8.11 and 8.12 by the plotted prediction standard
deviation. This demonstrates that the LCS model is suitable for data where the
level of noise differs for different areas of the input space.
8.3.5
A Slightly More Complex Function
To demonstrate the limitations of the rather na ıve model structure search me-
thods as introduced in this chapter, the last experiment is performed on a slightly







































































































































































































































































































































































Search WWH ::

Custom Search