Information Technology Reference
In-Depth Information
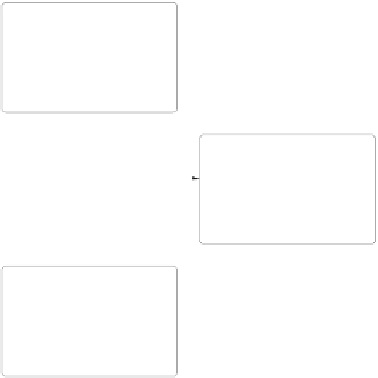
f(v,s,v0)<max_acc
f(v,s,v0)<max_acc
and g(v,s,v0)>f(v,s,v0)
Max_acceleration
and f(v,s,v0)>g(v,s,v0)
v'=max_acc
s'=v−v0
f(v,s,v0)>max_acc
f(v,s,v0)>max_acc
Motor_1
Motor_2
f(v,s,v0)>g(v,s,v0)
v'=f(v,s,v0)
v'=g(v,s,v0)
s'=v−v0
g(v,s,v0)>f(v,s,v0)
s'=v−v0
Brake
v−v0>k1*v0
v−v0>k1*v0
v'=brake_dec
s'=v−v0
v−v0<k2*v0 and
v−v0<k2*v0 and
f(v,s,v0)>g(v,s,v0)
g(v,s,v0)>f(v,s,v0)
f(v,s,v0)=−1.679*(v−v0)
−0.0008*s−0.307*v0
g(v,s,v0)=−0.1995*(v−v0)
−0.000024*s−0.0015*v0
Fig. 14. Hybrid automaton of drive train subsystem
6.2
Synthesizing Lyapunov Functions
To compute a function
V
that fulfills the conditions in Definition 5, we use a
fixed parameterized function template: quadratic functions of the form
V
(
x
)=
x
T
Px
,
P
n
×
n
. In this representation, the parameters are isolated in the
symmetric matrix
P
. This means we have to compute matrix entries for
P
,such
that conditions a) to d) are satisfied.
As detailed in [28,42], this can be done with the help of
linear matrix in-
equalities
[8], as long as the differential equations for all modes are ane. Linear
matrix inequalities are optimization problems with constraints given as definite-
ness constraints on matrices. They will be formally defined in the following.
Phrasing the problem to find an adequate
P
as a linear matrix inequality allows
the use of convex optimization software like CSDP [7] to identify suitable matrix
entries.
∈
R
n
×
n
is called
positive semidefinite
if x
T
Px
Definition 6.
AmatrixP
∈
R
≥
0
n
. This is also denoted P
for all x
∈
R
0
. For given matrices M
1
,...,
M
j
∈
R
n
×
n
,a
linear matrix inequality
is a problem of the form:
Find x
1
,...,
x
j
∈
R
such that x
1
M
1
+
...
+
x
j
M
j
0
.
Define
I
as the
n
n
identity matrix. The problem of finding a Lyapunov function
as in Definition 5 corresponds to the following linear matrix inequality [42]. Find
P
,μ
i
m
×
such that:



























Search WWH ::

Custom Search