Information Technology Reference
In-Depth Information
true / sc := Keep,
Φ
N
/
Far
Appr
sc := Keep, extEoA := tt
CS.s := EoA
sc = Keep
sc = Keep
afterCS(pos) /
sc := Keep
sc := Brake
/
OK
SafeAppr
Braking
sc = Brake
sc = Keep
FailSafe
(spd=0)
sc = Brake
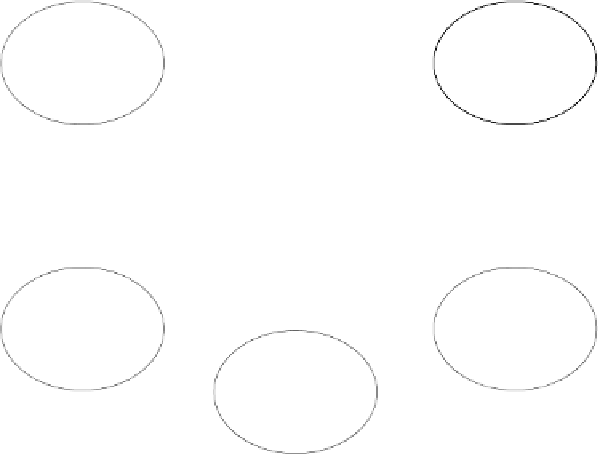
Fig. 9. Train controller
The dynamics of the train controller is described by the automaton in Fig. 9.
Initially, the controller is in the mode Far. When the predicate
Φ
N
abbrevi-
ating
pos
ST
(
spd
,Δ
C
) becomes true the controller switches to the
mode Appr. On occurrence of a signal
OK
the controller switches to the mode
SafeAppr indicating that the train can safely approach the critical section. In
this mode the train continues to keep its speed. If the predicate
Φ
abbreviating
pos
≥
EoA
−
SB
(
spd
) becomes true the controller switches to the mode Braking
where it forces the train to brake until a complete stop. If the train's speed is
zero, the controller enters the mode FailSafe. In the terminology of Fig. 7, the
mode Appr is the phase
NEGOTIATION
, SafeAppr is
CORRECTING
,and
Braking is
RECOVERY
.
The RBC is modelled only as far as the communication concerning the exten-
sion of
EoA
is concerned. It outputs of current
EoA
to the train and if requested
to extend it by an
extEoA
signal may grant an
OK
signal. Thus the
RBC con-
troller
has the following time dependent variables.
≥
EoA
−
Variables:
RBC controller
input
extEoA
:
Time
→
B
(request to extend EoA)
local
x
:
Time
→
Time
(clock)
output
EoA
:
Time
→
Position
(current EoA)
OK
:
Time
→
B
(EoA is extended)
Modes:
Idle, Check, Unsafe























Search WWH ::

Custom Search