Information Technology Reference
In-Depth Information
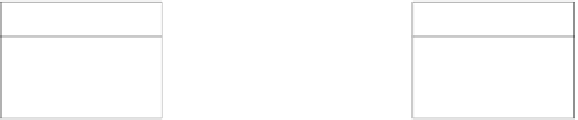
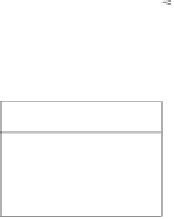
EoA
Train Controller
RBC Controller
extEoA
EoA
OK
pos
spd
sc
Train Plant
pos
spd
acc
Fig. 8. Communication between train and RBC
For the dynamics of the train we assume the continuous transition relations
pos
•
=
spd
and
spd
•
=
acc
and the invariants
−
b
≤
acc
and
spd
≤
v
max
.Here
we are interested only in the change of speed during braking:
acc
=
0
if
sc
=
Keep
∨
(
sc
=
Brake
∧
spd
=0)
−
b
if
sc
=
Brake
∧
spd
>
0
The
train controller
monitors the position and speed of the train. When ap-
proaching the current end of authority
EoA
(guarding a critical section) it re-
quests for an extension from the RBC by sending an
extEoA
signal. If the RBC
sends a signal
OK
the controller requests the train plant to keep the (desired)
speed. If the RBC does not reply in time and instead the train passes the posi-
tion
SB
the controller forces the train plant to brake. Thus the train controller
has the following time dependent variables.
Variables:
Train controller
→
input
pos
:
Time
Position
(position of the train)
spd
:
Time
→
Speed
(speed of the train)
EoA
:
Time
→
Position
(current EoA)
OK
:
Time
→
B
(EoA is extended)
local
CS
.
s
:
Time
→
Position
(begin of critical section)
output
extEoA
:
Time
→
B
(request to extend EoA)
sc
:
Time
→{
Keep
,
Brake
}
(speed control)
Modes:
Far, Appr, SafeAppr, Braking, FailSafe








Search WWH ::

Custom Search