Environmental Engineering Reference
In-Depth Information
all possible subsets of candidate components are systematically determined in order
to choose the best one. It also has options for the forward inclusion or forward
regression method [48] and various criteria for assessing the best model.
Good results have been obtained by Casali
et al.
[11, 16, 17] and by Gonzalez
et al.
[10, 31] using stepwise regression in the design of soft sensors for grinding
circuits and flotation concentrate grades.
p
y
u
PLANT
v
ξ
1
ξ
2
ξ
4
ξ
5
y
ξ
3
Phenomenological
Knowledge
Set of
Candidate
Components
ϕ
1
ϕ
2
ϕ
k
ϕ
ν
Selection
of
Model
Components
ϕ
κ
ϕ
j
ϕ
σ
ϕ
p
y
Model
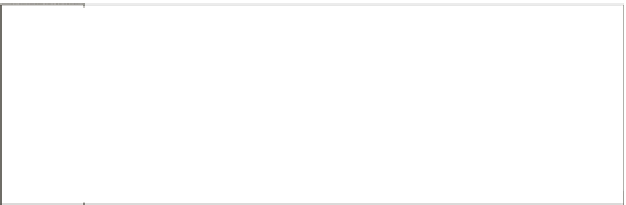
Figure 4.6
Example of a structure determination for a black box model, where the candidate com-
ponents are measured variables or functions of them, derived from phenomenological knowledge
about the plant. The manipulated variables are in vector
u
. Vector
v
contains the measured distur-
bances and vector
p
the unmeasured disturbances
1.2
1
0.8
0.6
0.4
0.2
0
-0.2
200
400
600
800
1000
1200
1400
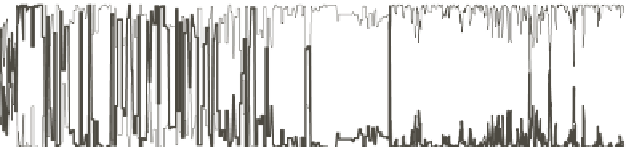
Figure 4.7
Evolution of the relative membership functions ψ
1
and ψ
2
used to combine the outputs
of models 1 and 2 corresponding to clusters
C
1
and
C
2
in the design of a concentrate grade soft
sensor for a rougher flotation bank (from [31])













































































































































Search WWH ::

Custom Search