Information Technology Reference
In-Depth Information
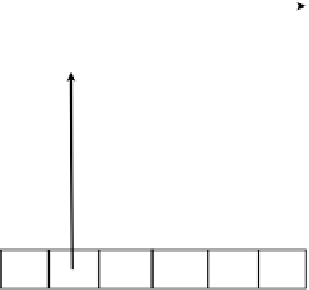
movement direction
Assembly
y
x
Feeder Magazine
movement direction
Fig. 2.5.
Robot movement
move in shortest possible path (i.e. always tries to move in vertical direction) if vertical
movement is not possible than it needs to stretch/compress its arm to avoid tardiness.
This section reveals the formulation of DPP problem statement using the following
notations:
V
a
speed of assembly arm
V
b
speed of board
V
¬
m
speed of magazine
N
number of placement components
K
number of component types (
K
≤
N
)
i
th
placement in a placement sequence
b
(
i
)
i
th
placement in a pick sequence
m
(
i
)
x
i
+1
=
M
i
+1
+
M
i
+1
interception distance of
robot arm
and
magzine
x
i
+1
=
B
i
+1
+
B
i
+1
interception distance of
robot arm
and
board
T
(
m
(
i
)
,
b
(
i
))
robot arm travel time from magazine loca-
tion
m
(
i
) to board location
m
(
i
).
T
(
b
(
i
)
,
b
(
i
))
robot arm travel time from board location
b
(
i
) to magazine location
m
(
i
).
Tplace
time taken to place the component
Tpick
time taken to pick the component
CT
total assembly time
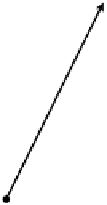
Fig 2.6 shows possible movements of board and magazine in DPP model [19]. Sup-
pose the robot arm has finished placing the
i
th
component at point
B(i)
then moves to
pick the next (
i
+ 1)
th
component from slot
M(i+1)
on the magazine. If magazine is able
to travel distance
d
(
a
,
c
)=
||
a
−
c
||
before the robot actually arrives vertically towards











Search WWH ::

Custom Search