Information Technology Reference
In-Depth Information
(
(see Figure 3). Additionally, Fig. 4
(right)
illustrates the raw image difference
between the two consecutive frames (
n
)
I
(
n
)
−
I
(
n
+
1
)
|
|
).
4
Experimental Results
Experimental results in real environments and different vehicle speeds are presented
in this section. In all the cases large error regions correspond to both moving objects
and misregistered areas. Several video sequences were processed on a 3.2 GHz Pen-
tium IV PC. Experimental results presented in this chapter correspond to video se-
quences recorded at 10 fps. In other words the elapsed time between two consecutive
frames is about 100 ms.
The proposed algorithm takes, on average, 31 ms for registering consecutive
frames by using about 300 feature points. Fig. 1
showstwoframesofa
crowded urban scene. This scene is particularly interesting since a large set of fea-
ture points over surfaces moving at different speed have been extracted. In this case,
the use of classical ICP based approaches (e.g., [18]) would provide a wrong scene
registration since points from static and moving objects are considered together.
The synthesized view obtained from frame
(
top
)
.The
quality of the registration result can be appreciated in the map of moving regions
presented in Fig. 4
(left)
. Particularly interesting is the lamp post region, where there
is a perfect registration between the 3D coordinates of these pixels. Large errors at
the top of trees or further away regions are mainly due to depth uncertainty, which
as mentioned before grows quadratically with depth [19]. Wrong moving regions
mainly correspond to hidden areas in frame
(
n
)
is presented in Fig. 3
(
le ft
)
(
n
)
that are unveiled in frame
(
n
+
1
)
.
I
(
n
)
−
I
(
n
+
1
)
|
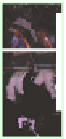
Figure 4
(
right
)
presents the difference between consecutive frames (
|
)
Horizon Line
(
I
n
+
1
Fig. 7
Map of moving regions (
D
(
u
,
v
)
) obtained
from the synthesized
view
)
(
I
n
+
1
)—bounding boxes are only
illustrative and have been placed using the information of horizon line position as in [9]
(
le ft
)
)
(Fig. 5
(
right
)
(Fig. 6
) and the corresponding frame














Search WWH ::

Custom Search