Information Technology Reference
In-Depth Information
50
50
100
150
100
150
200
250
200
250
300
350
300
350
400
450
400
450
100
200
300
400
500
600
100
200
300
400
500
600
Frame
(
n
)
Frame
(
n
+
1
)
Frame
(
n
)
Frame
(
n
+
1
)
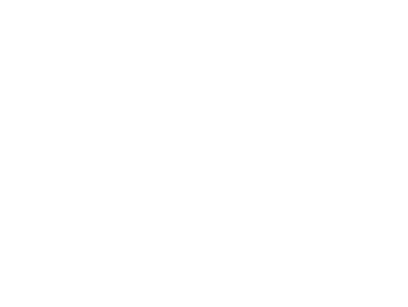
Fig. 1
Feature points detected and tracked through consecutive frames:
(
top
)
using Harris
corner detector;
(
bottom
)
using SIFT detector and descriptor
n+1
n
P
1(x,y,z)
P
1(x,y,z)
Z
Z
X
X
n+1
P
2(x,y,z)
n
[
R | t
]
P
2(x,y,z)
Y
Y
n
n+1
P
3(x,y,z)
P
3(x,y,z)
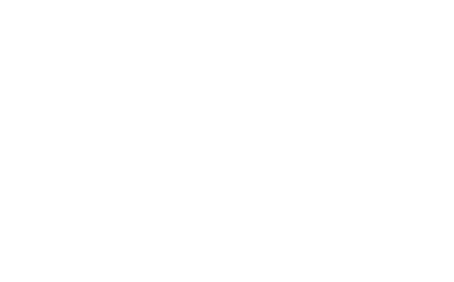
Fig. 2
Illustration of feature points represented in the 3D space, together with three couples
of points used for computing the 3D rigid displacement:
[
R
|
t
]
—RANSAC-like technique

























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Search WWH ::

Custom Search