Information Technology Reference
In-Depth Information
(a)
(b)
(c)
(d)
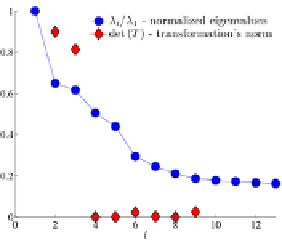
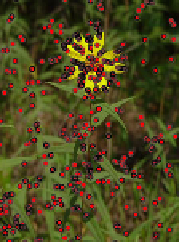
Fig. 7
Symmetric pattern embedded in clutter.
(
a
)
Eigenvalues λ
i
(
b
)
Interest points, in both
object and (mostly) background
(
c
)
Symmetric transform corresponding to ψ
2
(
d
)
Symmetric
transform corresponding to ψ
3
further. Still, the SSA manages to come out with three rotational symmetries as can
be seen in Figs. 10b-10d.
Figure 11a presents an image where the SSA detected a false symmetry along
with correctly detected local symmetry, which is shown in Fig 11b. In this image our
underlying assumption that symmetries are manifested by multiple self-alignments
is invalid due to the projection of the three dimensional object onto the two dimen-
sional plane of the camera.
Figure 12 depicts more results of the SSA. Symmetry detection of faces is shown
in Figs. 12a,12c. This is of particular interest, as face features are inherently sym-
metric and there are numerous works [VP06] aiming at their detection, without
explicitly utilizing symmetry. Note that SIFT features are able to capture corre-
sponding symmetric features, but not those considered important in face recog-
nition, such as the mouth tips and the nostrils. In Fig. 12d a false symmetric
correspondence, is detected alongside the true symmetry in the car's wheel. It could
have been discarded by requiring that points along a symmetry axes, will also be
part of a rotational symmetry, as reflectional symmetry is always accompanied by
rotational symmetry (See Section 2). Also, we did not impose a size constraint
on the detected symmetric object, or its aspect ratio. This exemplifies that in real








Search WWH ::

Custom Search