Information Technology Reference
In-Depth Information
(a)
(b)
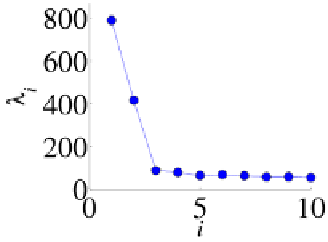
Fig. 5
Reflectional symmetry
(
a
)
Eigenvalues λ
i
(
b
)
The reflection corresponding to λ
2
found to correspond to the identity transform and is thus discarded. By estimating
T
C
2
, the symmetry is found to be a rotational symmetry as det
1. Applying
Eq. 4 to
T
C
2
recovers the center of symmetry, that is marked by a red dot in the
Fig. 4b. Eigenvalues
(
T
C
2
)
≈
λ
3
,
λ
4
uncover the remaining symmetrical self-alignments,
which are drawn in Figs. 4c and 4d, respectively. The analysis of
}
i
>
4
,
i
<
P
re-
veals that the remaining alignments are either identity transforms or repetitions of
previously found symmetries. Such duplications are identified and discarded using
the Frobenius norm.
Figure 5 depicts an object with a reflectional symmetry. The eigenvalues shown
in Fig. 5a indicate that besides the trivial identity transform represented by
{
λ
i
1
there
exists an alternative self-alignment. This point correspondence, derived from
λ
ψ
2
,
is shown in Fig. 5b, and by computing det
1, we conclude that it is a
reflectional symmetry. The symmetry axis is then recovered by applying Eq. 8 to
T
C
2
(
T
C
2
)
≈−
1. Similar results are
achieved by fitting the normal line to middle of the line segments connecting the
corresponding points. The resulting reflection axis is shown in Fig. 5b.
Figure 6 presents an image exhibiting both rotational and reflectional symmetries,
and the SSA is able to detect both simultaneously. The corresponding eigenvalues
reported in Fig. 6a reveal the existence of three non-trivial self-alignments due to
the four leading eigenvalues. We proceed by computing the corresponding transfor-
mations
T
C
2
,
T
C
3
and
T
C
4
.
T
C
2
and
T
C
3
come out to be the reflectional symmetries
presented in Figs. 6b and 6c, along with the reflection axis marked by a red line.
The third non-trivial self-correspondence
T
C
4
and connecting the two eigenvectors corresponding to
λ
i
=
is detected as a rotation, as det
(
T
C
4
)
≈
1.
C
4
, the corresponding mapping and the estimated rotation center are depicted
in Fig. 6d.
Figure 7 presents an example of a real image, where the distinctiveness of the
eigenvalues corresponding to symmetric patterns, degrades due to the image proper-
ties. Those include poor image quality and appearance variations of the correspond-
ing symmetric parts, which can not be compensated by the local features. Most of
the interest points lie within the background, creating a highly cluttered set of points











Search WWH ::

Custom Search