Information Technology Reference
In-Depth Information
3.2
Local Features
The use of local features is one of the corner stones of modern computer vision.
They were found to be instrumental in a diverse set of computer vision applications
such as image categorization [ZMLS07], mosaicking [BL03] and tracking [TT05],
to name a few. Originating from the seminal works of Cordelia Schmid [SM97] and
David Lowe [Low03], local features are used to represent an image
I
by a sparse set
of salient points
}
, where each point is represented by a vector of parameters
D
i
denoted a
descriptor
. The salient set
{
x
i
is detected by a
detector
.
The detector and descriptor are designed to maximize the number of interest
points that will be redetected in different images of the same object, and reliably
matched using the descriptors. The descriptor characterizes a small image patch
surrounding a pixel. Due to their locality, local features are resilient to geometrical
deformations and appearance changes. For instance, a global complex geometrical
deformation, can be normalized locally by estimating a dominant rotation angle and
characteristic scale per patch, or by estimating local affine shape moments [MS04].
The choice of the geometrical normalization measures depends on the geometrical
deformation we aim to handle. The set of local features
{
x
i
}
{
D
i
}
is then denoted the
image model
of a particular image.
Definition 3 (Image model).
The Image model M is made of the set of N interest
points S
N
1
, the corresponding set of local descriptors
N
1
and a set of
=
{
x
i
}
{
D
i
}
N
1
.
local attributes
σ
i
are the local dominant orientation and scale,
respectively, of the point i. Denote M
{
θ
i
,
σ
i
}
θ
i
and
N
1
,whereM
i
=
{
=
{
M
i
}
x
i
,
d
i
,
θ
i
,
σ
i
}
.
A myriad of region detectors and descriptors can be found in literature [MTS
+
05].
One of the most notable, being David Lowe's SIFT descriptor [Low03]. Vari-
ous objects might require different combinations of local detectors and descrip-
tors [MTS
+
05], depending on the object's visual properties. For instance, the
SIFT [Low03] excels in detecting and describing naturally textured images, while
large piecewise constant objects are better detected by the affine covariant MSER
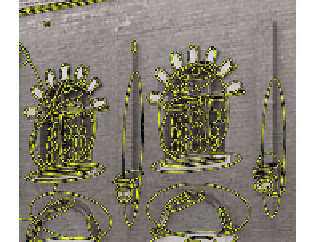
(a)
(b)
Fig. 2
Feature point detectors.
(
a
)
A Hessian-based scale-invariant detector is more suitable
for non structured scenes
(
b
)
MSER responds best to structured scenes.





Search WWH ::

Custom Search