Information Technology Reference
In-Depth Information
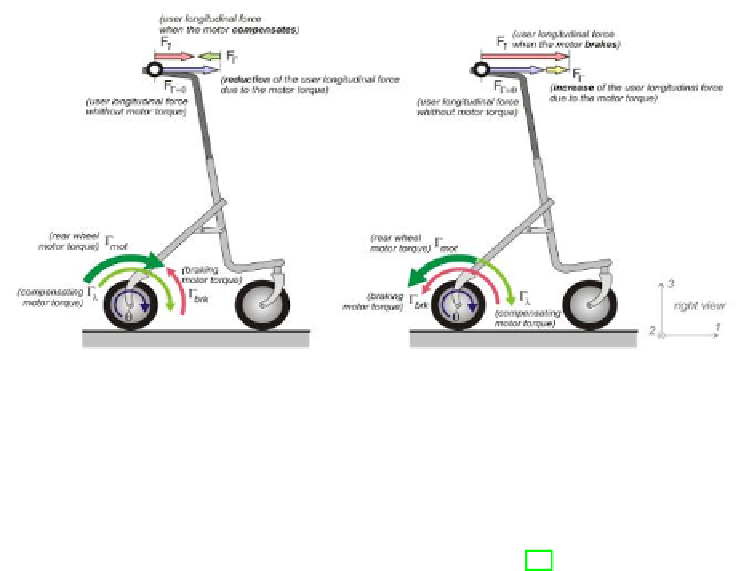
Fig. 2.
i-Walker
Control
-
Submissive because it monitors the user to see if s/he is resisting the actions (steer-
ing/braking) selected by the walker. If they are, the movements are adjusted. This
cycle continues until the user agrees with the motion (
i.e.
does not resist it) or man-
ually over-rides it. This interaction forms the basis of the feedback loop between
the user and the agent. Similar approach can be found in [29].
The manual brakes have also been replaced with an automated braking system. The
walker can sense the user's steering input via sensors in the handles that detect the
difference in force on the two handles.
-
Pushing with more force on one handle (left or right), the walker will turn in the
opposite direction.
-
Applying of equal force on both handles will move the walker straight forward or
backward (which direction can be determined by the
i-Walker
's wheel encoders).
One of the main objectives of
SHARE-it
is helping the users in orienting them when
handling the
i-Walker
in a known environment as their home or neighbourhood. The
user will receive help from a screen, but the innovative idea will be steering by moderate
braking, for helping in navigation. Apart from the multi-modal (in particular speech)
interface, we will experiment with moderate brake on the
i-Walker
's wheels to gain the
experience on
how
to better guide the user by allowing s/he sharing with the computer
the steering actions.
4.2
Agent Layer
Agents can be defined to be autonomous, problem-solving computational entities capa-
ble of effective operation in dynamic and open environments. In Artificial Intelligence
research, agent-based systems technology has been hailed as a new paradigm for con-
ceptualizing, designing, and implementing software systems. Agents are often deployed
Search WWH ::

Custom Search