Information Technology Reference
In-Depth Information
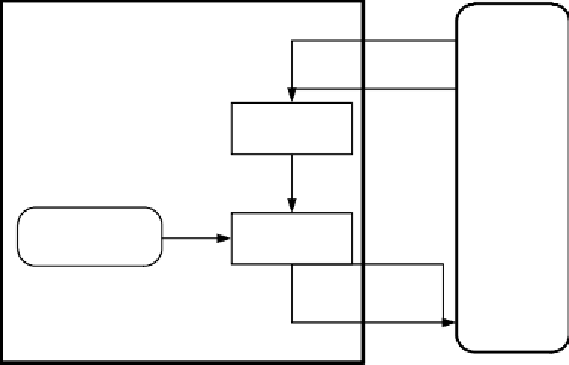
Agent
Sensor
Current
World
Environment
Condition -Action
Rule
Action
Effector
Figure 14.5. the architecture of reactive agent
Reactive agents are related with Professor Brooks in MIT who proposed the
behavior-based artificial intelligence (Brooks, 1991). He think intelligent
behaviors are result of communication between agents and the environment.
Brooks is not only a critic, but also a practice expert. He implemented some of
Robots without symbol reasoning. These Robots is a subsumption architecture
system. Subsumption architecture is a hierarchical behaviors which can finish
the tasks. Every behavior try to control the robot which cause the competition
between them. The behaviors in base layer represent the relative original
behaviors which have high priority. As a result, the implementation of this kind
of architecture is relative simple. Brooks alleged the agent with this kind of
architecture can finish the tasks by symbol based artificial intelligence.
14.3.4
Hybrid Agent
We have discussed the architecture of reactive agent and deliberative agent. They
reflect the characteristics of behavior based artificial intelligence. However, both
pure reactive agent and deliberative agent architecture are best way to build
agent. People begin to propose the hybrid agent which to connect the classic and
non-classic artificial intelligence.
The obvious architecture is that an agent includes two sub system. The one is
deliberative agent which has the symbol based world model and can generate