Java Reference
In-Depth Information
-
the sum of their output flow is equal to the sum of the output flows of
the spray and drain pump when the mixture tank is full.
13.5
■
Prototype 2: Tank controllers
This prototype implements the automatic controllers that regulate the flow
of paint between the tanks. The result is a distributed system that animates
the behaviour of tanks and pumps under the control of the automatic con-
trollers and the responsible technician.
13.5.1
Analysis
According to the domain model discussed in Section 13.2.1, the SCADA
architecture is organized as a flat interconnection of autonomous and decen-
tralized control modules that implement specific functionalities, e.g. they
implement the control logic of a PLC. In a real car painting system, every
PLC would be connected to the sensors and actuators of a physical device
through dedicated communication media, such as a serial cable. The PLCs
communicate with each other through the internet.
In Section 13.4 we have designed the work cell simulator as a standalone
application that animates the behaviour of all the physical devices.
Figure 13.7 shows the distributed structure of the SCADA system after the
introduction of the work cell simulator. The PLCs are no longer connected
to the physical devices directly. Instead, they communicate with the work
cell simulator through the internet. Thus, the first requirement that we have
to deal with is the possibility of interconnecting the simulator with the PLCs
through the internet.
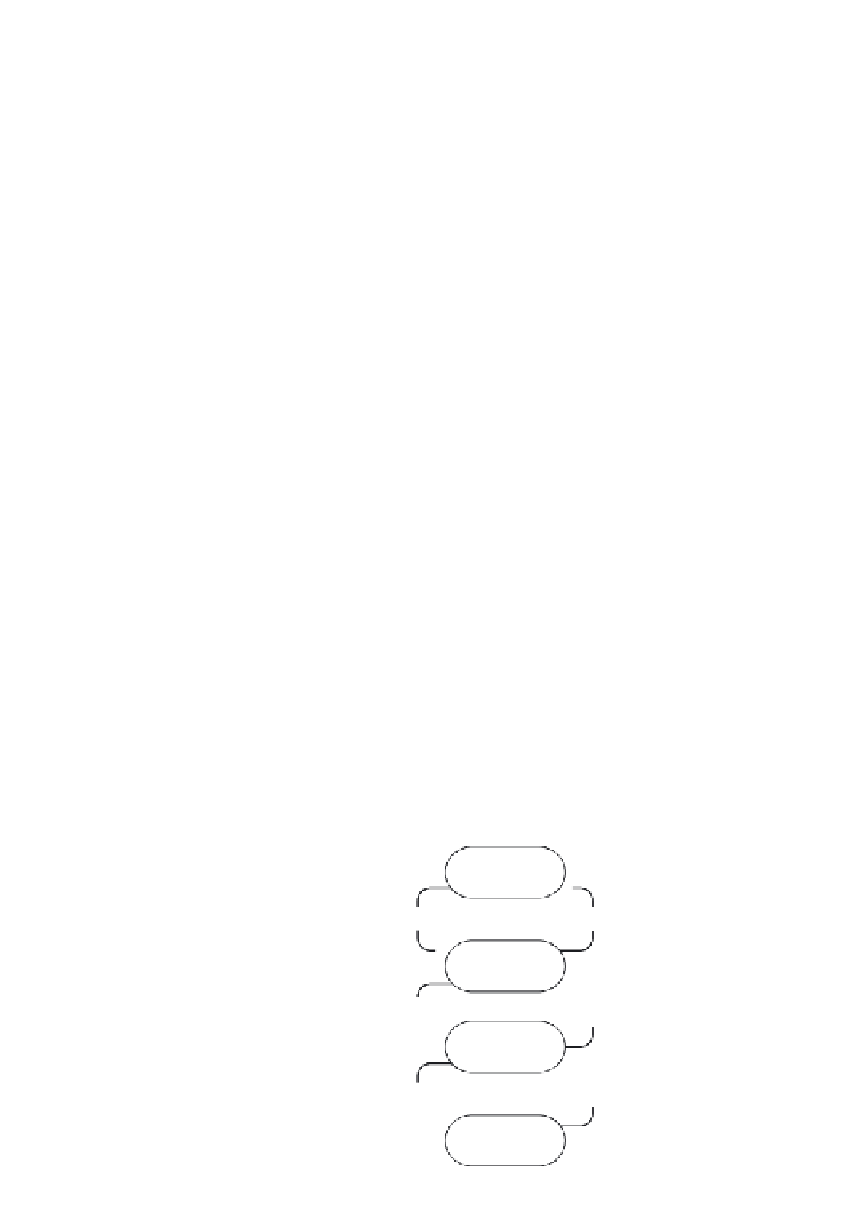
FULL
I
90%
I
90%
Input
0%
NOTFULL
I
50%
I
50%
Input
50%
Input
50%
NOTEMPTY
I
10%
I
10%
Input
100%
EMPTY
Figure 13.10
The PLC's finite state automaton