Java Reference
In-Depth Information
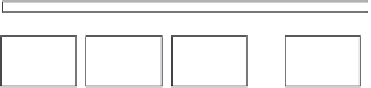
PLC
PLC
PLC
PLC
Figure 13.7
The interconnection of the centralized simulator with the PLCs
modelled as a finite state automaton. For example, the pump behaviour is
characterized by two states (
OPENED
,
CLOSED
) and two transitions (
open
,
close
). Similarly, the tank behaviour is characterized by at least three states
(
EMPTY
,
NOTEMPTY
,
FULL
) and two transitions (
pull
,
push
). This model does
not seem appropriate for simulating the car painting work cell for two
reasons:
1 We need to model a pump's output flow explicitly as a parameter that can
assume a set of values within the range 0 to the maximum flow value.
2 We need to animate a tank's level variations in such a way that the user
has the impression that the input and output paint flows are continuous as
in the real work cell.
Thus, we choose the thread-based simulation model (see the Chapter 10
case study “Mobile robot exploration”). Accordingly, the paint flow between
two tanks is modelled as a sequence of micro-volumes that are continuously
pulled from the upstream tank and pushed into the downstream tank.
The flow intensity is proportional to the section of the pump's valve that
links the two tanks and to the speed of the paint flow. We assume that the
flow speed is constant and thus we stipulate that the transfer frequency of
micro-volumes of paint is constant. Let
x
[
t
k
] be the paint level in a tank at
time instant
t
k
,
u
[
t
k
] the input micro-volume at
t
k
,
y
[
t
k
] the output micro-
volume at
t
k
,
φ
O
(
t
k
) the input and output paint flows of a tank,
S
(
t
k
) the section of a pump valve,
φ
I
(
t
k
) and
T
the
constant time interval between two subsequent micro-volume transfers. The
following relations hold.
ν
the constant flow speed, and
∆
φ
(
t
k
)
=
S
(
t
k
)
*
ν
S
(
t
k
)
=
p
(
t
k
)
*
S
Max
p
(
t
k
)
=
0,
...,
100
u
(
t
k
)
=
φ
I
(
t
k
)
*
∆
T
y
(
t
k
)
=
φ
O
(
t
k
)
*
∆
T
x
(
t
k
+
1
)
=
x
(t
k
)
+
u
(
t
k
)
−
y
(
t
k
)
t
k
+
1
=
t
k
+ ∆
T
Decision point
Execution model: single thread or multithreads?