Java Reference
In-Depth Information
component devices. Thus, every device knows its position with regard to
the reference frame of the simulated environment and has access to its
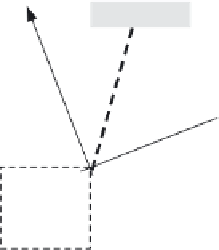
description. A laser measurement is simulated as depicted in Figure 10.11.
Coordinates L
x
and L
y
represent the laser position in the environment's
reference frame. Variable
indicates the global orientation of the rotary
tower (equal to the sum of the robot's orientation and the laser's orientation
with regard to the robot's reference frame). V1 and V2 indicate the end
points of the segment that represents the edge of an obstacle. Segment
LF represents the laser beam. Its length corresponds to a laser distance
measurement.
According to the problem specification, the operational environment is
assumed to be static; this means that the obstacles do not change their size,
shape and position in the environment during the robot exploration. The
interaction between the robot and the environment is dynamic because,
during exploration, the robot and the sensors change their position with
regard to the environment. Real robot actuators have a limited resolution
that adds uncertainty to the exact entity of the robot displacement. We
assume that the execution of movement commands is not affected by uncer-
tainty. As described in Section 10.1.1 the laser device and the rotary tower
are highly precise. The simulation of a laser scan consists of a sequence
of fine-grained rotation steps (e.g. one degree) and, for each step, the
acquisition of a distance measure.
It might happen that the laser acquires distance measures while the robot
is moving. The simulation of the robot movements must consist of
sequences of fine-grained displacement steps. For sake of simplicity, we
assume that the robot displacements consist of forward and backward trans-
lation or clockwise and anticlockwise rotations around the origin of its
reference frame. In Section 10.1.2 we have pointed out that the laser needs
to know the current position of the robot in the environment in order to
simulate distance measurements and to detect the surrounding obstacles.
This can be modelled by giving the laser access to the current position of the
mobile platform.
θ
Y
y
V1
V2
F
x
θ
L
y
L
L
x
X
Figure 10.11
Simulation of a laser measurement