Java Reference
In-Depth Information
NL
SL
N
NL
x
0 && y
0
y
0
WD
WD
E
W
WD
x
0
SL
S
NL
SL
x
0 && y
0
WD
Figure 9.2
The assembler automaton
9.2.4
The AGV finite state automaton
The AGV executes operations on demand. The drill and the cutter machines
issue requests of piece transfer from their output buffers to the assembler's
input buffer as soon as they complete manufacturing operations. The AGV
records the requests of operations and executes them one at a time. Four
basic states characterize the AGV behaviour: it is waiting at a station or it is
moving towards a station; it is empty or it is full (carrying a piece). In order
to represent the correct sequence of operations, it is necessary to determine
whether the AGV is waiting at the unloading stations (the drill and the cutter
machines) or at the loading station (the assembler). In fact, different events
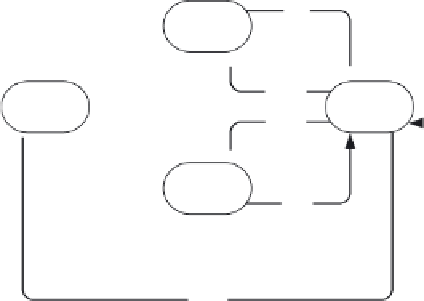
are enabled in these situations. Accordingly, Figure 9.3 depicts the AGV
automaton that comprises five states. The state variable
x
represents the
number of mission requests still pending.
WE_LS
: the AGV is empty and is waiting at the loading station of its last
mission. This state corresponds to the situation when it has completed all
the requested missions.
■
ME
: the AGV has started a new mission and it is moving towards the
unloading station. The AGV records any new mission request that is
issued meanwhile.
■
WE_US
: the AGV has arrived at the unloading station. It is ready to unload
a new piece from the drill or the cutter machines.
■
MF
: the AGV has unloaded a piece from the machine and is carrying it at
the assembler.
■
WF
: the AGV has arrived at the assembler station and is loading the piece
in its input buffer.
Four events determine state transitions:
■
WD
: a machine has completed an operation and issues a new mission
request.
■