Information Technology Reference
In-Depth Information
1
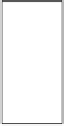
Input signal 1
×
1
Output signal
2
Input signal 2
(a) A simple Simulink diagram
Mutation
Mutation enable
4
1
Input signal 1
×
1
Output signal
2
Input signal 2
(b) A Simulink diagram with a mutation
Fig. 4.
A simple Simulink program and its mutation
Accordingly, a typical execution satisfies the following constraint:
R
(
s
2
,s
3
)
intermittent fault
I
(
s
0
)
∧
R
(
s
0
,s
1
)
∧
R
(
s
1
,s
2
)
∧
∧
R
(
s
3
,s
4
)
∧
...
Transient or intermittent faults can be modeled by referring to a global timer. Let
R
be a transition function with a permanently enabled mutation. Furthermore,
given a state
s
i
,let
s
i
.t
denote a signal tracking progression of time during the
execution. A transition function
R
with an intermittent fault occurring every
c
execution steps can be modeled as
R
(
s
i
,s
i
+1
) f(
s
i
.t
=0mod
c
)
R
(
s
i
,s
i
+1
) f
s
i
.t
R
(
s
i
,s
i
+1
)
de
=
.
=0mod
c
)
Mutations are small syntactic changes of the model, whereas simulated hardware
faults require semantic changes to the model that reflect physical faults of the
system as accurately as possible. Conceptually, however, there is no difference
when it comes to their integration into the transition relation: The implementa-
tion of faults in the model
M
requires syntactic changes to
M
.