Information Technology Reference
In-Depth Information
3
Segment Based Stereo Matching
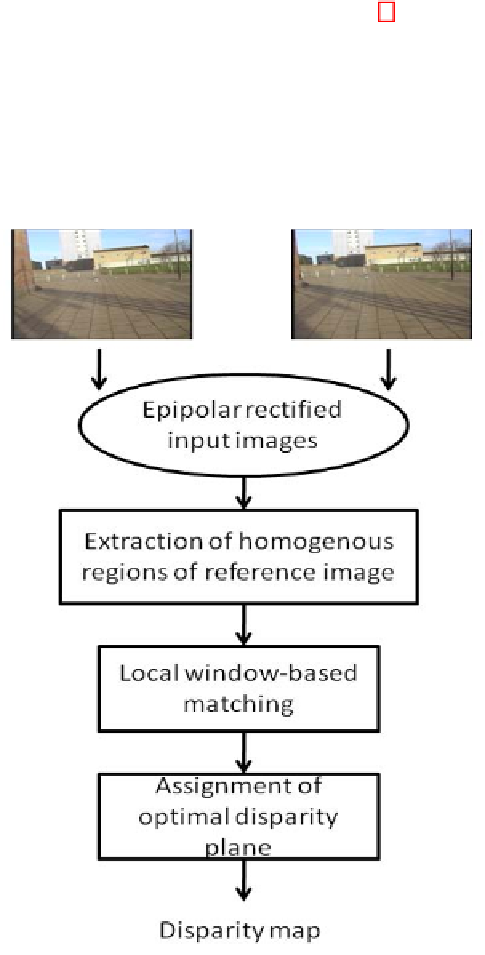
Segment based methods normally consist of four steps to obtain the estimated sur-
faces, whose algorithm is illustrated in Fig. 6. First of all, the regions of homoge-
neous colour are detected by using a colour segmentation algorithm. This is fol-
lowed by a local window based matching method that is utilised to estimate the
disparities across two groups of image points. A plane fitting is then applied to gen-
erate disparity planes that indicate the feature points. Finally, an optimal disparity
plane is obtained using a greedy optimisation algorithm.
Fig. 6
Flowchart of the segment based stereo matching algorithm