Information Technology Reference
In-Depth Information
θ
k
and
r
k
(
k
indicates current state), we iterate
the following E and M stages via the expectation-maximisation (EM) algorithm
[20]:
(1) E-stage: Assuming that
Considering the current estimation
θ
k
and
r
k
are fixed, we expect to obtain
q
i
that max-
imises the right hand side of the object function. The solution is expressed as:
q
i
=
ω
i
N
(
x
i
,
θ
k
,
r
k
)
θ
k
,
r
k
)
.
(2) M-stage: Considering
q
i
as constants, we maximise the right side of the ob-
ject function with respect to
i
=1
ω
i
N
(
x
i
,
∑
θ
and
r
. The inlier fraction
θ
is solved by
θ
k
+1
=
i
=1
x
i
ω
i
N
(
x
i
,
θ
k
,
r
k
)
∑
,where
r
is updated according to the following equation
r
k
+1
∝
N
i
=1
ω
i
N
∑
(
x
i
,
θ
k
,
r
k
)
¯
N
i
=1
q
i
(
x
i
−
θ
k
)(
x
i
−
θ
k
)
T
. This E-M iteration will terminate if and only if
|
θ
m
+1
−
∑
¯
is less than a pre-defined threshold (
¯
θ
m
|
in group
m
). In
other words, the difference between two distributions instead of two consecutive
samples is used as a stopping criterion.
θ
m
denotes an averaged
θ
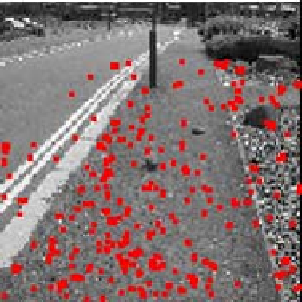
(a)
(b)
Fig. 3
Estimated ground planes (in red color and hereafter) by (a) the improved RANSAC
method, and (b) a classical RANSAC technique with the constraint where the number of
outliers falls below a pre-defined threshold.
Fig. 3 illustrates the estimated ground planes, highlighted by red color, using two
different techniques. It is observed that the proposed scheme leads to more accurate
coplanar determination. For example, Fig. 3(a) shows that the points on the stones
(in the image centre) have been correctly identified to be over the ground plane
by the proposed approach. At the same time, the classical RANSAC plane fitting
approach fails to do so (Fig. 3(b)). This indicates that the proposed algorithm can be
used to accurately recover 3-D shapes from 2-D image pairs.