Information Technology Reference
In-Depth Information
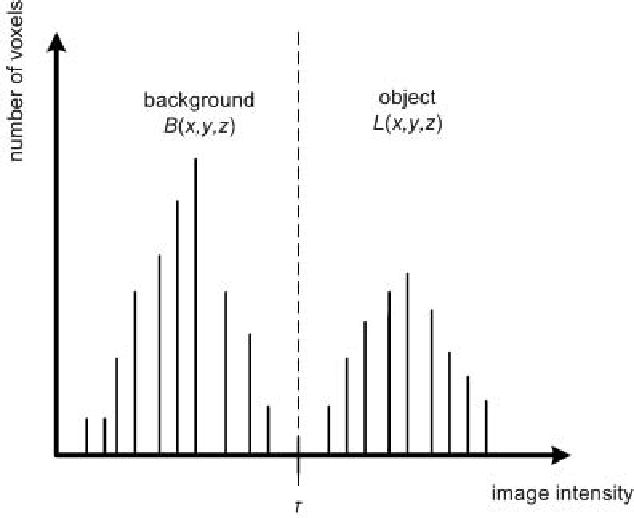
Fig. 2
An example of biomodal histogram with the selected threshold
τ
applied. The object area
L
(
x,y,z
) and the background
B
(
x,y,z
) are functions of the
threshold
. Therefore, the threshold level that minimizes either
dL
d
τ
or
τ
dB
is often a good choice, especially in the absence of operator guidance and
when prior information on object locations is not available.
Global thresholding fails if there is a low contrast between the object and the
background, if the image is noisy, or if the background intensity varies signifi-
cantly across the image. In this case adaptive thresholding can be applied. Adap-
tive thresholding is locally-oriented and is determined by splitting an image into
subvolumes and by calculating thresholds for each subvolume, or by examining
the image intensities in the neighbourhood of each voxel. The splitting method di-
vides an image into rectangular overlapping subvolumes the histograms are calcu-
lated for each subimage. The subvolumes used should be large enough to include
both object and background voxels. If a subvolume has a biomodal histogram,
then the minimum between the histogram peeks should determine a local thresh-
old. If a histogram is unimodal, the threshold can be assigned by interpolation
from the local thresholds found for nearby images. In the final step, a second in-
terpolation is necessary to find the correct thresholds for each voxel. Although lo-
cal thresholding is computationally more expensive, it is generally very useful for
segmenting objects from a varying background, as well as for extraction of
regions that are very small and sparse.
d
τ