Information Technology Reference
In-Depth Information
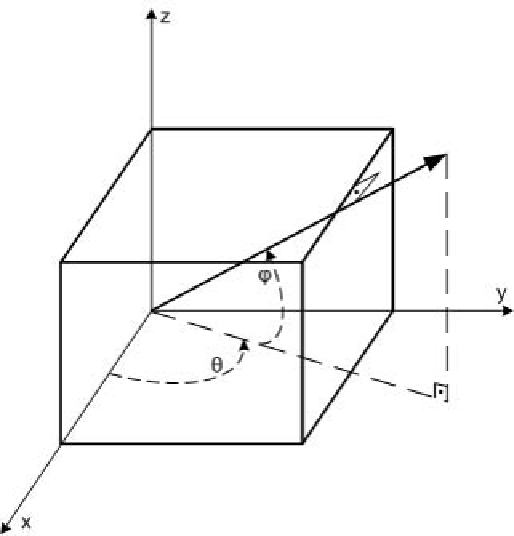
Fig. 1
3D orientation representation
where the edges are in order to decide whether an edge has been found, computing
of gradient components is followed by a threshold operation on a gradient. More
about thresholding can be found in Section 1.
Although that Canny 3D edge detection is computationally fast and easy to im-
plement because no a-priori information about image features is needed, the object
is often not well defined because detected edges do not surround and enclose the
object completely. To form boundaries that enclose the object, a postprocessing
step of grouping edges and linking them into one single boundary is required.
Since the peaks in the first-order derivative correspond to zeros in the second -
order derivative, the Laplacian operator (which approximates the second deriva-
tive) can be used to detect edges [4]. The Laplacian operator
2
∇
of a function
f
(
x
,
y
,
z
) is defined as
2
2
2
∂
G
(
x
,
y
,
z
)
∂
G
(
x
,
y
,
z
)
∂
G
(
x
,
y
,
z
)
2
∇
G
(
x
,
y
,
z
)
=
+
+
(3)
2
2
2
∂
x
∂
y
∂
z
The Laplacian operator can be approximated digital images by an
N x N x N
con-
volution mask in each direction. The image edges are denoted with voxel positions
where Lapalcain operator has zero value.