Information Technology Reference
In-Depth Information
B
X
−
B
X
M
Z
x
x
x
[pixels]
m
m
f
C
C
X
[meters]
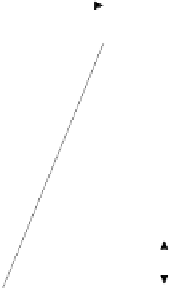
Fig. 3
Reconstruction of the depth coordinate via triangulation
x
f
=
X
y
f
=
Y
Z
Z
,
and
,
(5)
x
f
y
f
=
X
−
B
=
Y
Z
,
and
,
(6)
Z
where
B
is the horizontal distance between the two cameras' optical centers, called
the
baseline
distance and
f
is the focal length of the cameras. It is obvious that
y
and
y
are identical, which constitutes the advantage of the parallel camera setup. The
disparity
d
corresponding to the horizontal displacement between corresponding
pixels is defined as
x
.
d
=
x
−
Once the correspondence problem is solved, the reconstruction of a point's depth
can then be accomplished via triangulation, as shown in Fig. 3. Indeed, the depth
Z
is simply derived by combining Eqs. (5) and (6)
Bf
=
Bf
d
Z
=
.
(7)
x
x
−
From the above equation, we conclude that disparity is inversely proportional to
depth. A disparity map that records the disparity for each image point is therefore
sufficient for a complete three-dimensional reconstruction of the scene.
2.3
The Stereo Correspondence Problem
Although epipolar geometry helps reducing the computationnal load of searching
corresponding points, the stereo correspondence problem still remains a difficult
task due to several factors. This includes