Information Technology Reference
In-Depth Information
4
4
50
100
150
50
100
150
3.5
3.5
3
3
200
250
300
200
250
300
2.5
2.5
2
2
350
400
450
350
400
450
1.5
1.5
1
1
500
500
100
200
300
400
500
100
200
300
400
500
(a) Barbara
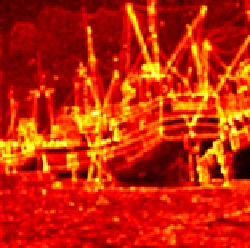
(b) Boat
Fig. 10
Local scaling parameters (
γ
i
) for (a) Barbara image and (b) Boat image. With the
choice of the adaptive regression order
γ
i
(42), the regression order becomes nearly
zero in the areas where γ
i
is close to zero, while in areas where γ
i
is around 5, the resulting
equivalent kernel given by (41) approximately becomes second order.
κ
i
= 0
.
01
when computing the steering matrices, no extra computation is required. A good
way to choose the regression factor (
κ
) locally is to make it a simple function of
γ
i
.
Specifically, we choose our adaptive regression factor by
κ
i
= 0
.
01
γ
i
,
(42)
where 0
.
01 is a global parameter controlling the overall sharpening amount. E.g. it is
possible to choose a larger number if a stronger sharpening effect is desired globally.
As shown in Fig. 10, with the choice of the adaptive regression order
κ
i
= 0
.
01
γ
i
(42), the regression order becomes close to zero in the area where
i
is close to
zero, while the resulting equivalent kernel given by (41) approximately becomes a
second order kernel in the area where
γ
too large results in
overshoot of pixel values around texture and edges. We process color video in the
YCbCr domain and estimate spatial orientations in the luminance component only,
since the human visual system is most sensitive to orientations in the luminance
component.
γ
i
is around 5. Setting
κ
5
Example Video Upscaling and Denoising Results
In this section, we provide video frames generated by the proposed MASK algo-
rithm as visual illustrations of its performance. We will provide examples of spa-
tial upscaling, temporal frame interpolation, and denoising. We compare MASK to
two other state-of-the-art multi-frame video upscaling methods: Non Local-mean
based super resolution [11] and 3-D iterative spatial steering kernel regression (3-
D ISKR) [13]. The algorithm proposed in [11] consists of multi-frame fusion with
Non Local-mean based weighting, as well as explicit deblurring. 3-D ISKR is an