Information Technology Reference
In-Depth Information
capable of simultaneous spatial interpolation with resolution enhancement, tempo-
ral video interpolation, noise reduction, and preserving high frequency components.
Initial results using MASK were presented in [20].
An overview of this chapter is as follows. Firstly, we provide a review of 2-D
SKR in Section 2. Then, we extend 2-D SKR to 3-D SKR and describe the MASK
approach in Section 3. Subsequently, we propose a practical video upscaling algo-
rithm based on MASK in Section 4, proposing further novel techniques to reduce
computational complexity and improve robustness. We present several example re-
sults of our algorithm in Section 5 and conclude in Section 6.
2
Review of Steering Kernel Regression
This section gives an overview of SKR, which is the basis of MASK. We be-
gin with describing the fundamental framework of SKR, called
kernel regression
(KR), in which we estimate a pixel value of interest from neighboring pixels using
a weighted least-square formulation. We propose an effective weighting function
for the weighted least-square estimator, called
steering kernel function
, that takes
not only spatial distances between the samples of interest into account, but also the
radiometric values of those samples.
2.1
Kernel Regression in 2-D
The KR framework defines its data model as
x
i
=[
x
1
i
,
x
2
i
]
T
,
i
,
i
= 1
,
···
,
P
,
y
i
=
z
(
x
i
)+
ε
(1)
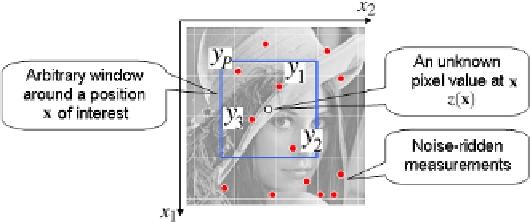
where
y
i
is a noisy sample at
x
i
(Note:
x
1
i
and
x
2
i
are spatial coordinates),
z
(
·
) is
the (hitherto unspecified)
regression function
to be estimated,
i
is an i.i.d. zero
mean noise, and
P
is the total number of samples in an arbitrary “window” around a
position
x
of interest as shown in Fig. 1. As such, the kernel regression framework
provides a rich mechanism for computing point-wise estimates of the regression
function with minimal assumptions about global signal or noise models.
ε
Fig. 1
The data model for the kernel regression framework