Information Technology Reference
In-Depth Information
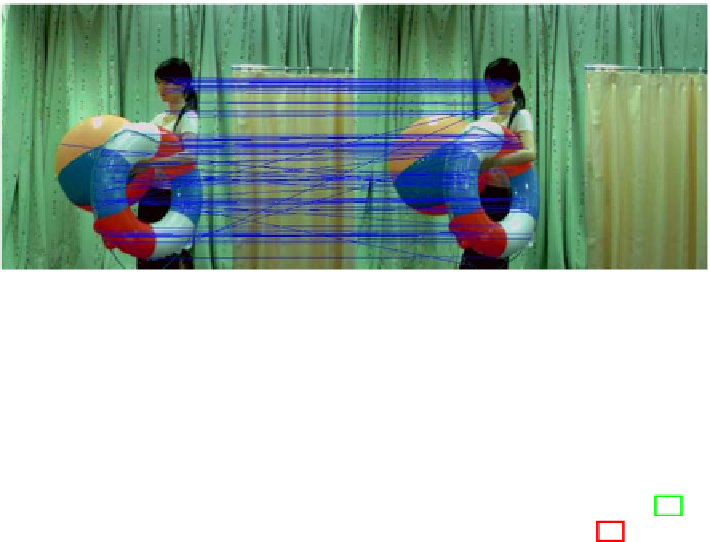
Fig. 11
Matched SIFT features
4.2
3D Motion Estimation
Having segmented foreground objects and the static background, the 3D motion
parameters of the moving objects, namely rotation and translation matrices, are es-
timated by using the features matched between the successive frames of the video
sequence. Scale Invariant Feature Transform (SIFT) algorithm detailed in [40] is
utilized in order to test the proposed multi-view FRUC algorithm. Fig. 11 illustrates
SIFT features from the successive frames of
Akko-Kayo
sequence.
Once the features on the moving rigid objects are matched, the next step is the cal-
culation of rotation and translation parameters. Fortunately, the depth values of ex-
tracted SIFT features are available for the
N-view-plus-N-depth
content type; hence,
3D motion estimation step is relatively simple. For this purpose, the initial step is
the determination of the 3D coordinates of the matched features, which is achieved
via the back-projection equation [32]:
)=
P
+
x
+
X
(
λ
λ
C
,
(16)
is a positive number,
C
denotes camera center,
P
+
represents pseudo in-
verse of the projection matrix. The inherent scale ambiguity is solved by using the
known depth of the point, and the exact coordinates are calculated. After determin-
ing the 3D coordinates of the matched features, we solve for
R
and
t
in (12) using
Random Sample Consensus (RANSAC) algorithm, [41], in a robust manner in order
to account for outliers in feature matching step:
where
λ
1.
R
and
t
matrices are estimated using quaternion approach, [42]
2. 3D coordinates of the features in the first frame are rotated and translated using
the estimated
R
and
t
matrices
3. Euclidean distances between available 3D coordinates of the features in the sec-
ond frame, and the 3D coordinates obtained by rotating and translating those of
features in the first frame are calculated,
4. The number of inliers are obtained by comparing these Euclidean distances by a
threshold,