Information Technology Reference
In-Depth Information
1.2
0.3
1
x
M
dot
y
M
dot
0.2
0.8
0.1
0.6
x
y
M
0
0.4
0.2
-0.1
0
-0.2
-0.2
-0.3
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
8
9
10
Time
t
[s]
Time
t
[s]
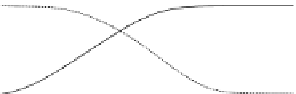
(a) Positions
x
M
and
y
M
vs. time
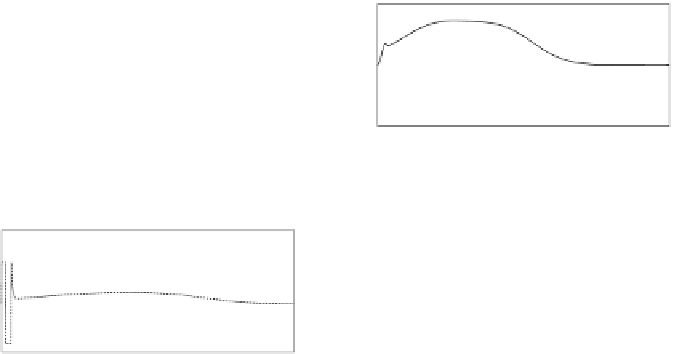
(c) Input
u
and velocity
u
vs. time
1.5
0.004
e
x dot
e
y dot
1
0.002
0.5
0
0
-0.002
u
u
dot
-0.5
-0.004
-1
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
8
9
10
Time
t
[s]
Time
t
[s]
(b) Velocities
x
M
and
y
M
vs. time
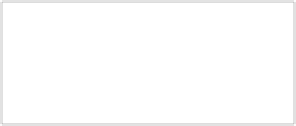
(d) Estimate errors
e
x
and
e
y
vs. time
Fig. 7.
Control results with θ
=
π
/
2.
4.2
Control Simulations
Next, the control simulations are performed with
, for example.
Figs. 6 (a) and (b) show the trajectories of the crane using two of the successfully-
evolved RNN controllers and the PF with 500 particles and
N
threshold
=
θ
0
=
π
/
2and
θ
0
=
π
3
N
p
for the
Estimation
, where, for simplicity, it is assumed that there is no disturbance in the system
but the PF is used only to estimate the hidden velocity states
x
M
and
y
M
basedonthe
observed position (
x
M
,
y
M
). More details of the control results are plotted in Fig. 7.
Clearly, the controller is able to regulate the system to the desired position.
In order to see how well the PF performed in the example, we also plot the errors
of estimations, i.e., the differences between the real states (velocities) and the estimates
provided by the PF, which are:
0
.
x
M
(
y
M
(
e
x
(
t
)=
x
M
(
t
)
−
t
)
,
and
e
y
(
t
)=
y
M
(
t
)
−
t
)
(8)
It appears that, although there exist errors, the PF could obtain small errors (see
Fig. 7 (d)), revealing that the estimated values are very similar to the real ones.
5
Discussion and Conclusion
Although underactuated systems with nonholonomic constraints seem to be a potential
approach with several advantages bringing it to broad applications, it is a fact that con-
trol of such systems is a challenging task. The study has presented an intelligent control
method for an underactuated crane with constraint by using an RNN optimized by PSO
while considering the problem with hidden velocities which were estimated by PF.





























































































































































Search WWH ::

Custom Search