Information Technology Reference
In-Depth Information
1:
for
i
=
1:
N
p
do
Sample:
x
i
k
∼ q
(
x
k
|x
i
k−
1
, y
k
)
2:
Weight update:
ω
k
∝ ω
k−
1
p
(
y
k
|x
k
)
p
(
x
k
|x
i
k−
1
)
3:
q
(
x
i
k
|x
i
k−
1
,y
k
)
4:
end for
Calculate total weight:
N
p
i
=
1
ω
k
5:
∑
Z
6:
for
i
=
1:
N
p
do
N
p
∑
Jib
Normalize:
ω
k
= ω
k
/
i
=
1
ω
k
7:
l
h
end for
8:
N
p
∑
i
=
1
Y
m
Effective no. of particles:
ˆ
(ω
k
)
2
9:
N
eff
=
1
/
ˆ
10:
N
eff
< N
threshold
11: Resample
12:
end if
if
G
θ
M
O
r
X
Fig. 3.
Particle filtering pseudocode.
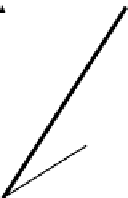
Fig. 4.
Model of the rotary crane system.
2
χ
=
√
,
ε
=
+
c
1
c
2
(6)
2
|
2
−
ε
−
ε
−
4
ε
|
ii) Estimation:
Used to estimate the latent states of the system. Namely, using the
incomplete measurements
y
to obtain the estimate
x
by PF. After the
Design
finishes
constructing a controller (using the system model with all sates completely observed),
the control process of the real plant are then executed while the PF performs in every
time step (online) to estimate the hidden states.
In principle, the objective of Bayesian estimation is to estimate the hidden
x
k
based
on the set of all available (observed) measurements
y
1:
k
=
{
y
i
,
i
=
1
,
2
, ...,
k
}
up to time
k
. To do so, the posterior probability density function (pdf)
p
is calculated recur-
sively. Based on Monte Carlo simulation, PF approximates the posterior by representing
the required posterior as a finite set of
N
p
random samples (particles)
X
k
=
{
(
x
k
|
y
1:
k
)
N
p
i
x
i
k
}
1
and
=
N
p
i
i
associated weights
1
. Fig. 3 shows the sampling importance resampling (SIR)
algorithm, a very commonly used PF. More details of PF approach can be found in
[10], [11].
{
ω
k
}
=
3
Rotary Crane System
The control object to be considered in this work is a rotary crane system as shown in
Fig. 4, which is also known as a nonholonomic system [13]. Herein,
is the rotation
angle which serves as the control input,
r
is the radius of rotation,
h
is the height from the
tip of the boom,
m
is the mass of the load, and
l
is the length of rope which is assumed to
be not elastic or slack. Assume that the vibration of swinging load is sufficiently small,
this study only considers the movement of the jib rotating around the
Z
axis.
θ




















Search WWH ::

Custom Search