Information Technology Reference
In-Depth Information
4
Experimental Analysis
We simulated and analyzed the performance of our belief management system for the
scenario of an office delivery robot, a promising application area for robotics. The robot
has to move objects between 59 rooms that are connected via 12 hallway segments. We
simulate a robot that is able to pick up an object, move between adjacent rooms, and
put the object currently carried down again. The robot is equipped with a vision sensor
registering objects within the same room, and a pressure sensor indicating whether it
currently carries an object. In order to resemble real robot systems more closely, con-
tinuous sensing was implemented as a new feature in IndiGolog.
The SSAs and action pre-conditions were implemented in a straightforward fashion.
Our background model states basic rules, for example that the robot has to currently
carry some object if the pressure sensor signals it. In order to prevent influences from
planning, we use a simple IndiGolog program, that chooses the next action to execute
out of a given sequence. Typical execution traces consist of about 40 steps.
We defined three fault scenarios: In
F1
the robot might fail to pick up an object with a
probability of
40%
and pick up the wrong object with
20%
.In
F2
the robot additionally
fails to release an object with a probability of
.In
F3
we add a probability of 5% that
a sensing action fails. These faults resemble issues that frequently occur in reality. We
define three sensing rates: In
S1
there is sensor data after every, in
S2
after every second,
and in
S3
after every third action. For a single mission, the robot has to deliver three
particular objects to three particular offices. A mission is accomplished if at the end all
objects are at the desired locations. It is failed if the interpreter aborts the program, the
execution exceeds a 2 minute time-out, or some object ends up misplaced.
A simple base line agent and another one equipped with our belief management sys-
tem have been tested. They had to solve 50 different missions 10 times each with vary-
ing seeds for any combination of fault and sensing rates. The percentage of successful
missions serves as performance measure.
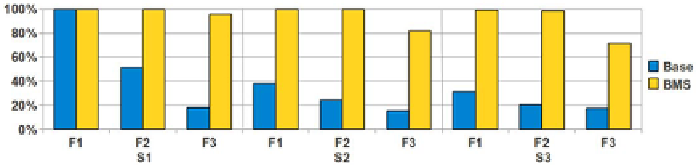
The results of our experiments are reported in Figure 1. The robot using our belief
management system significantly outperforms the robot without this extension. From
the figure, it is also evident that while with rising difficulty (more fault types) the per-
formance of both robots declines, belief management helps to keep it at a decent level.
A declining sensing rate has a negative impact on performance too, based on the fact
that the robot has less information to detect and repair inconsistent situations.
30%
Fig. 1.
Successfully completed missions with (BMS) and without belief management (Base).
Search WWH ::

Custom Search