Information Technology Reference
In-Depth Information
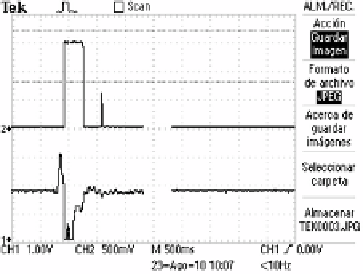
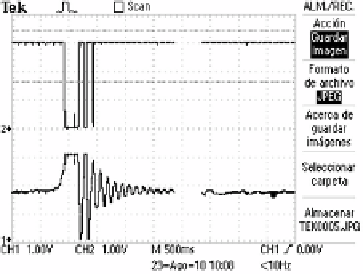
analogical stage. Signal remains at virtual ground (
V cc/
2) when the transducer
is not perturbed. When a force increasing happens (sitting fact), signal goes to
0 V while about 100 ms and goes back to its rest value. When force is decreased
(standing up fact), signal is fired to
Vcc
and comes back to rest in the same way.
This signal is digitalized by thresholds to get two signals that actuate as external
interrupts to the micro-controller, as shown in Figure 2. Complex movements on
the bed or couch, with different intensities, could lead to partial and unreliable
detection, as the oscillations observed in Figure 2. This justifies the need of
weight measurement on the system at rest to ensure the occupancy.
Fig. 2.
Force change detector outputs. On the left, force increment detection (sitting
fact); on the right, force decrement detection (standing up fact.)
Test have been effectuated on the occupancy sensor prototype for several
values for the parameters pointed at Seccion 3. Resistor
R
1
has been adjusted
to suppress the over-shot (
OS
) keeping the rising time (
T
r
) as low as possible.
Resulting values are:
R
1
= 150
Ω
,
OS
=0%y
T
r
=70
ns
.
Remaining hardware parameters, as well as the data processing algorithm,
have been tuned by means of test series in the following way. The mote has
been configured to sample and transmit the weight every 2 s. All combination of
standard values in a range have been tested for both variants of the schematics
with every processing algorithm among three proposed ones. The samples have
been recorded for two states: (1) only a chair weight and (2) chair plus 85 kg
subject. All the samples have been tabulated to find the configuration with the
best stability on readings (lowest variation range on each state) and the highest
distance between readings from one state to the other. The final configuration
is as follows:
R
2
=1
MΩ
from the range [100
kΩ
−
10
MΩ
]and
C
2
= 470
pF
from [2
pF
−
680
pF
] with the schematics and processing algorithm described in
Seccion 3.
The sensor cluster has been validated by people with different weights. The
sensor has properly indicated the chair occupancy for every subject. Readings
of the analog sensor and calculated thresholds are shown on Table 3.



Search WWH ::

Custom Search