Information Technology Reference
In-Depth Information
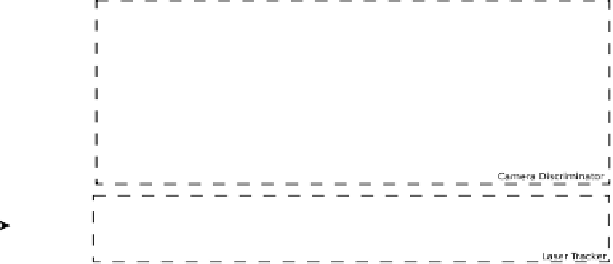
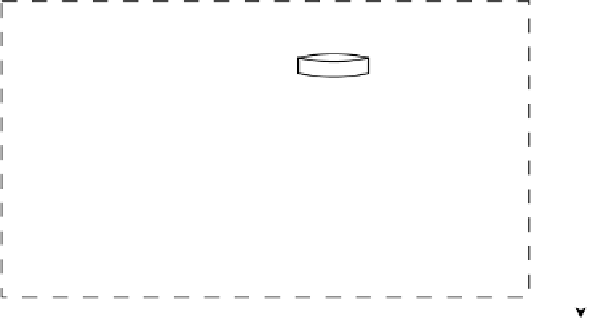
Fig. 1.
Schematic representation of our system
concept of
potential fields
, will determine the motor commands so that the robot
follows the target avoiding collisions with the environment.
We have noticed that the performance of our system is mainly due to the role
of the camera module. Because of this, and also due to the fact that the laser
module does not differ substantially from the one described in [1], we will only
describe the camera module in detail in the next sections.
2.1 Target Model
Our system builds a model of the target that is composed of five normalized
feature histograms. These histograms contain information about the colours and
textures of the torso corresponding to the target. The colour is characterized by
three components: hue (H), lightness (L) and saturation (S). The information
about the texture is provided by the local binary patterns [6], and the edges
detected with the
canny
method [7].
We used the HLS non-linear colour space since the linear ones, such as RGB,
do not capture human intuitions about the topology of colours [8]. The HLS space
is obtained by applying a non-linear transformation on the RGB space, thus
obtaining a new base for colour representation: hue, lightness and saturation.
Hue is the property of a colour that varies in passing from red to green, lightness
is the property that varies in passing from black to white and saturation is the
property of colour that varies in passing from red to pink. From these definitions,
we can expect hue to be a good descriptor for torsos with vivid colours, while
lightness will perform better on torsos that are almost white or black. Due to
the dicult conditions of the environment: dynamic, crowded, changing light
conditions,etc, we must consider each feature independently, in order to be able
to dynamically select those which increase the discrimination amongst the target
and the distractors.
Regarding the texture descriptors, the first one included in our feature space
is a histogram representation of the local binary patterns (LBP). A local binary





























































Search WWH ::

Custom Search