Information Technology Reference
In-Depth Information
In the incremental algorithm [2] the coecients are updated as follows:
a
ij
(
k
+1)=
a
ij
(
k
)+
Δβ
(
k
)
0
≤
Δ
≤
1
(5)
β
(
k
)=
1
if re ard
/
success
0or
−
1
if punish
/
fail
where the parameter
Δ
is also critical.
4 Experimental Results
As we are mainly interested in on-line, real-time implementation of lexical coor-
dination in physical multi-robot systems our simulation experimental work has
revolved around moderate team sizes typical of multi-robot systems, in the order
of 10 or less robots and for them we have experimented with different lexicon
dimensions and complexity, as regards speed and stability convergence.
We have conducted series of 600 experiments with the lexicon dimensions
from 2
×
×
×
signals). In all these cases we have centered our
efforts on studying the convergence to a common
Saussurean
lexicon for teams
of 5 and 10 robots.
2to7
7 (meanings
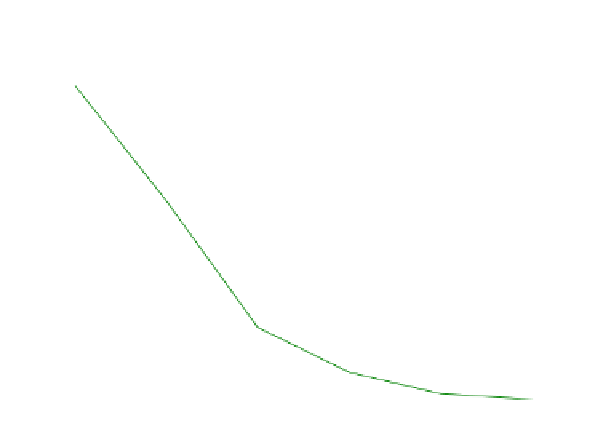
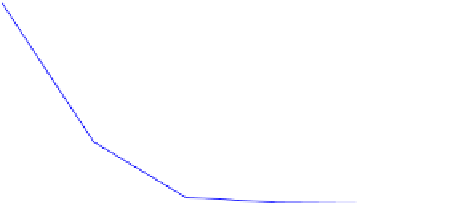
Percentage of success in teams of 5 and 10 robots
vs. different lexicon sizes
1.0
0.8
0.6
0.4
0.2
0.0
2
3
4
5
6
7
Lexicon dimensions
Fig. 3.
Rate of success on the consensus to a
Saussurean
communication system for
cases of 5 and 10 robots and lexicon dimension from 2 signals and 2 meanings to 7
signals and 7 meanings. Each case of the results presented is based on 600 repetitions
and the maximum number of rounds was set to 500. Upper curve: 5 robots. Lower
curve: 10 robots.

























Search WWH ::

Custom Search